Certains m’ont fait remarqué que je n’avais pas donné beaucoup de nouvelles ces derniers temps. En même temps, c’est pas faux. J’avais commencé à écrire cet article début Mars, et puis, une chose en entraînant une autre, voilà qu’on est déjà mi-Avril. C’est plutôt bon signe, non ?
Alors, je suis sûr que vous vous demandez tous si je suis parti en vacances ou si j’ai déjà abandonné. Même pas vrai ! Enfin, je suis quand même parti en vacances entre temps, mais… bon.
Prototype
Le prototype du robot a bien avancé !
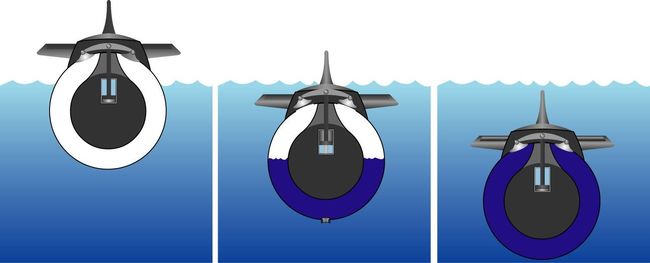
Déjà, j’ai réalisé une erreur de conception : le cylindre étanche était positionné en partie basse. Pendant les premiers tests de flottaison et d’étanchéité, le robot n’était pas stable et penchait d’un côté ou de l’autre… Forcément, la partie qui flotte se trouve en bas ! C’était prévisible, mais bon voilà, je n’y avais pas pensé. Donc, un premier changement, relativement simple : renverser le cadre du robot et inverser les propulseur verticaux, pour que le cylindre étanche soit en partie haute du cadre, ce qui lui permet de trouver une position stable.
Ensuite, après avoir passé des semaines et beaucoup de patience pour maintenir l’eau en-dehors de mon cylindre étanche, j’ai décidé d’installer un ballast et donc de faire entrer de l’eau à l’intérieur du cylindre. Volontairement !
Forcément, j’ai du repenser la solution d’étanchéité, notamment au niveau du passage des câbles électrique et de la prise de la pompe de ballast. Alors, une application maîtrisée de colle sur le presse étoupe, de graisse sur les filets du bouchon et de silicone dans la gaîne des câbles a eu raison des dernières gouttes rebelles.
Tests
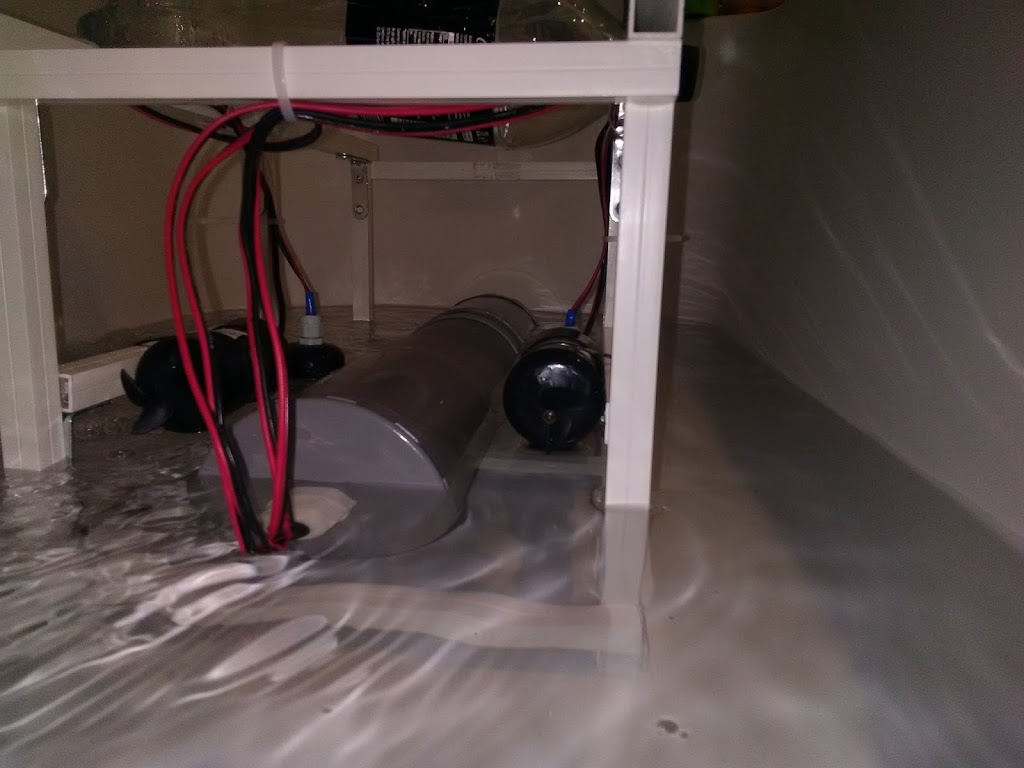
La solution a été testée plusieurs fois ‘à vide’, c’est à dire sans électronique dans le tube étanche, pour ne pas risquer de griller mes circuits bêtement. Et enfin, fin Février, le robot complet a pris ses premiers ‘bains’ avec succès ! J’ai pu tester le fonctionnement des moteurs, du ballast et de l’électronique.

Comme on peut le voir sur la vidéo… l’AUV n’était pas lesté et ne pouvait donc pas plonger, malgré le remplissage du ballast et les propulseurs verticaux. Sacré Archimède. Depuis, j’ai ajouté du lest sur la structure extérieure, pour l’alourdir et le stabiliser (il penchait vers l’arrière). Notez que j’ai utilisé des vis (on reste low tech…), bien pratiques pour leur poids de 25g chacune.

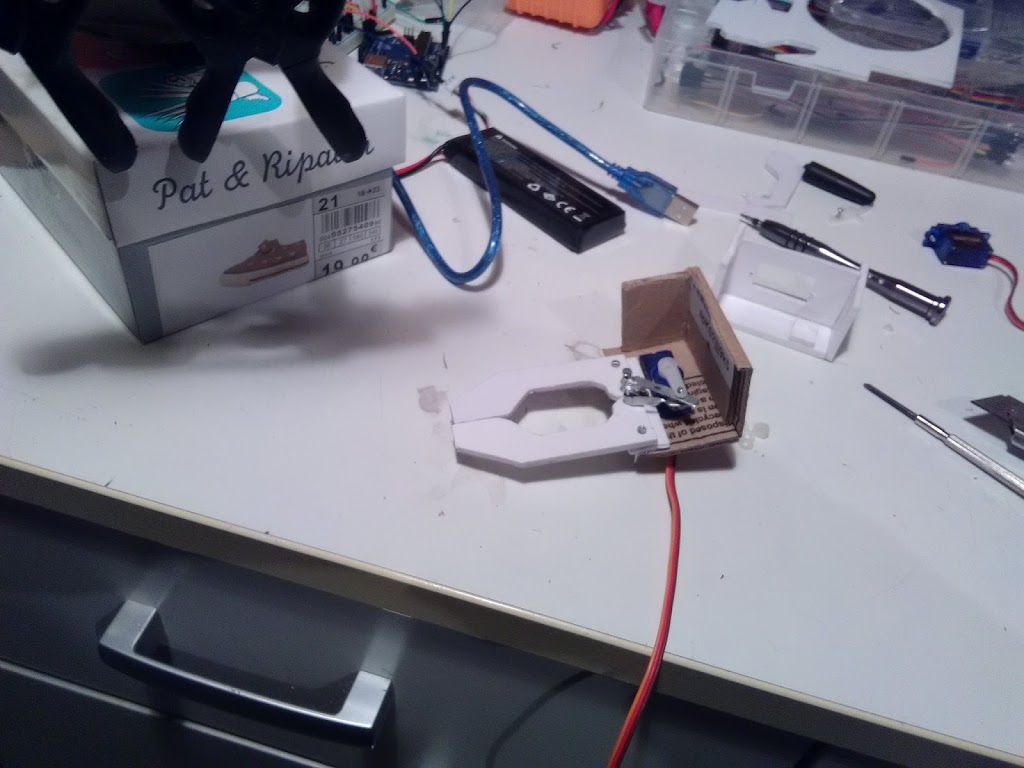
Mais aussi, quel est l’intérêt de faire plonger un sous marin si on ne peut même pas voir ce qu’il se passe ? Alors, j’ai vissé une caméra étanche à l’avant, juste sous le cylindre.

Tout ce petit monde devait se jeter dans une piscine, mais je n’ai pas encore pu réaliser ces fameux tests. Pour cause de : travaux de la piscine, de pluie diluvienne et de… travail !
Mais rassurez vous: ça ne saurait tarder et je ne manquerai pas de vous montrer ce que ça donne, avec un belle vidéo de la première plongée !
A très bientôt pour d’autres nouvelles…