Bonjour à tous !
On enlève son gilet jaune et on le range bien sagement dans sa boîte à gants. On réfléchira un peu plus tard pour savoir où faire le plein sur la Côte d’Azur aujourd’hui. Parce qu’aujourd’hui on parle… fabrication et assemblage.
Comme je l’avais évoqué dans les articles précédents, les pièces du nouveau prototype de l’AUV ont été complètement redessinées pour être plus jolies, plus fortes, plus fonctionnelles et moins nombreuses. On pourrait rajouter ‘plus chères’ aussi, mais qu’est ce qu’on ne ferait pas pour la science ?
Une bonne impression
L’avantage indéniable de l’impression 3D est de pouvoir obtenir des pièces mécaniques complexes, dans un délai et un prix raisonnables. Ce procédé permet de se lâcher un peu et de regrouper des pièces ou des fonctionnalités en un seul morceau.
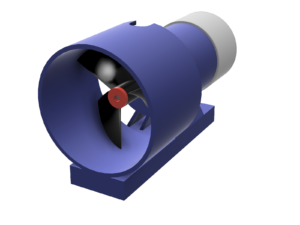
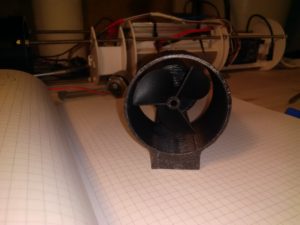
Par exemple, j’ai pu considérablement simplifier la conception des propulseurs latéraux, en regroupant l’enveloppe étanche du moteur (2 pièces), le support (2 pièces) et le cache (1 pièce)… Plutôt intéressant, donc !



En suivant cette même logique, j’ai donc pu considérablement simplifier l’assemblage du robot, en regroupant les assemblages autant que possible. Mais comme certains me l’ont fait remarquer : « Tu te marreras moins au moment de passer à l’industrialisation ! ». Eh… c’est pas faux.

Fraise et laser
Pour la réalisation des pièces de structure, j’ai fait appel à un usineur de la région pour tailler du plastique à grand coup de rayons laser. De même, les bouchons ont été usinés par un fraiseur-tourneur et le résultat final est impeccable !
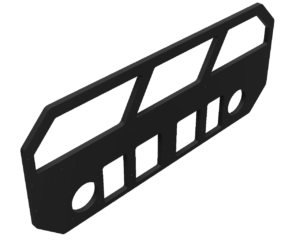

Merci à ABA Production pour cette excellente réalisation ! Vous pouvez y aller les yeux fermés (enfin… regardez un peu la route quand même, hein ?).
Assemblage de la bête
Alors, en résumé je dispose à ce stade :
- des pièces de structures en POM-C
- des bouchons en PEHD
- du tube en PMMA
- d’une partie du support interne
- d’une partie des support externe
Rien ne m’empêche d’assembler ces morceaux pour essayer ! Au lieu de regarder « L’Amour est dans le Pré« , je file à la cave et je m’y mets.
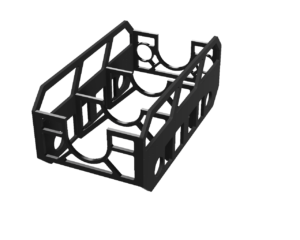

Pour commencer, la structure externe s’assemble sans aucun soucis ! Les plaques latérales se vissent sur les supports intermédiaires : là encore, ça se monte de manière impeccable, sans le moindre jeu. Mes plans étaient vraiment très bons 😅
J’installe les 11 presse-étoupes et les 2 joints toriques sur le bouchon arrière…

Mais là, je réalise que le diamètre interne réel du tube en PMMA ne correspond pas à ce qui est indiqué sur le descriptif technique. Le bouchon avec les joints est beaucoup trop ajusté et n’entre pas dans le tube… Je suis obligé d’en poncer l’intérieur, ce qui lui donne cet aspect laiteux pas super esthétique. Vu le prix des bouchons et le prix du tube, je n’ai pas réfléchi longtemps !
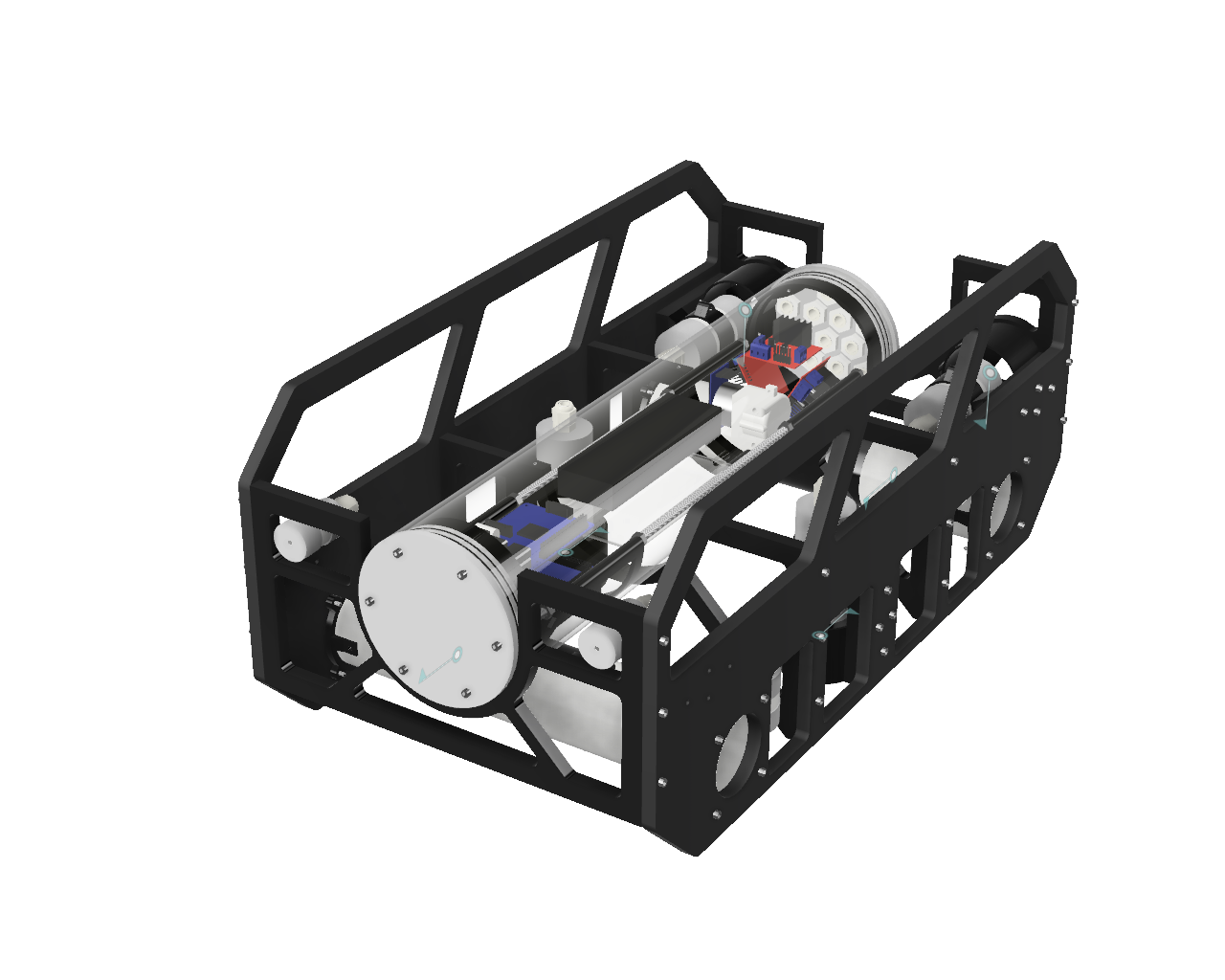
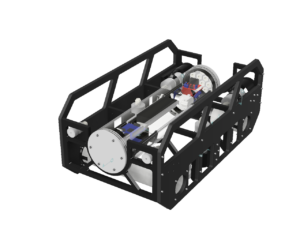
Et enfin… tadaaaam ! C’est juste pour essayer, parce que je n’ai pas encore toutes les pièces pour finaliser (notamment les supports internes / externes obtenus par impression 3D). Mais quand même, ça fait quelque chose de voir la bête prendre forme 😊

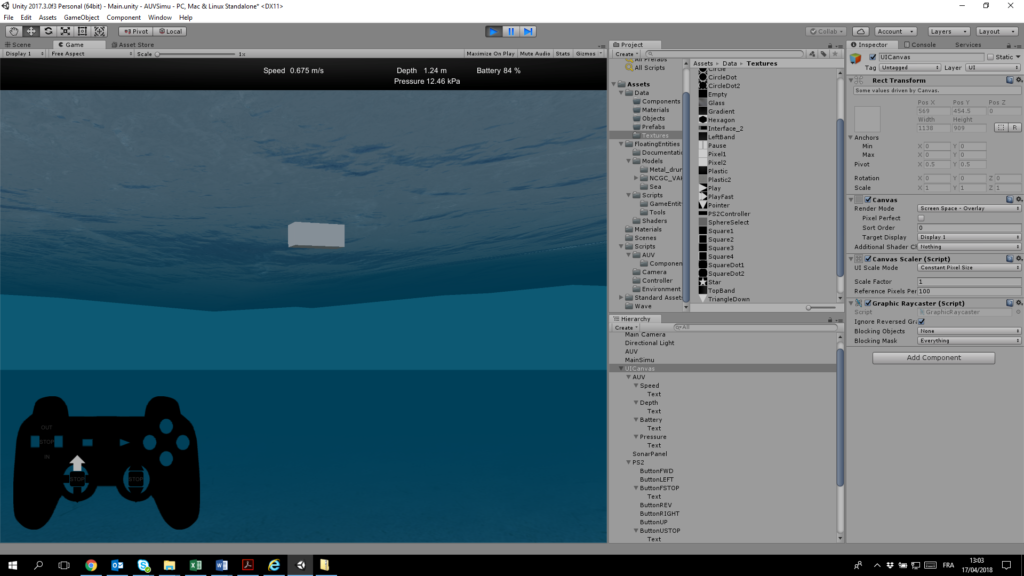
Et maintenant… il me reste encore beaucoup de choses à faire. Une fois que toutes les pièces mécaniques seront réalisées et que le tube pourra être fermé hermétiquement, je plongerai tout ça dans l’eau pour vérifier l’étanchéité ! En attendant, je vais continuer de travailler sur la partie programmation et l’interfaçage avec les différents instruments et contrôles. Mine de rien, ce n’est pas une mince affaire, vu la différence de logique entre la programmation d’un RaspBerry et d’une Arduino !
Une fois que ce sera fait… Hop, on remet tout ça dans l’eau et on voit si… comment ça marche.
A très bientôt pour de nouvelles aventures !