A l’eau !

Après avoir plusieurs fois reporté l’événement pour diverses causes (pas assez d’eau, trop d’eau, trop froid, manque de temps…), j’ai finalement réussi à réunir les conditions nécessaires pour réaliser les tests en piscine du robot !
Je tiens donc tout d’abord à remercier Albin et Julia pour le prêt de leur piscine, et surtout à Marc, pour avoir réussi à me motiver et avoir accepté de se mouiller pendant que je restais bien au sec… Pour info, l’eau était à 12°C !
C’est donc avec grand plaisir et un peu d’appréhension que j’ai mis le robot dans l’eau pour la première fois, Jeudi 19 Avril. J’avais passé en revue les différentes catastrophes qui pouvaient en découler (il ne marche pas, il prend l’eau, il reste bloqué au fond, il s’enfuit, il attaque les gens et déclenche le soulèvement des machines…), mais j’ai du me rendre à l’évidence : on était prêt à le faire et il fallait simplement accepter le risque.
Lestage / équilibrage
Après avoir résolu les quelques fuites récalcitrantes (« La graisse, c’est la vie » disait Caradoc), on a put ajuster le lestage et l’équilibrage. Les quelques 500g de lest que j’avais déjà fixé sur le cadre ne suffisaient pas à le rendre neutre en plongée : il manquait encore 1.5kg de plomb ! On a donc attaché une ceinture de plongée, positionnée au 3/4 avant du robot.
Avec ce réglage, le robot plonge et remonte sans aucun effort, avec une assiette bien à plat.
Tests en surface
On a pu procéder au tests de navigation en surface. Le robot répond bien aux ordres transmis par la télécommande, même si le lest additionnel le ralentit considérablement… En surface, on arrive à le contrôler sans trop de difficulté sur toute la longueur de la piscine, sans perte du signal radio. Ça, c’est fait !
Tests en plongée
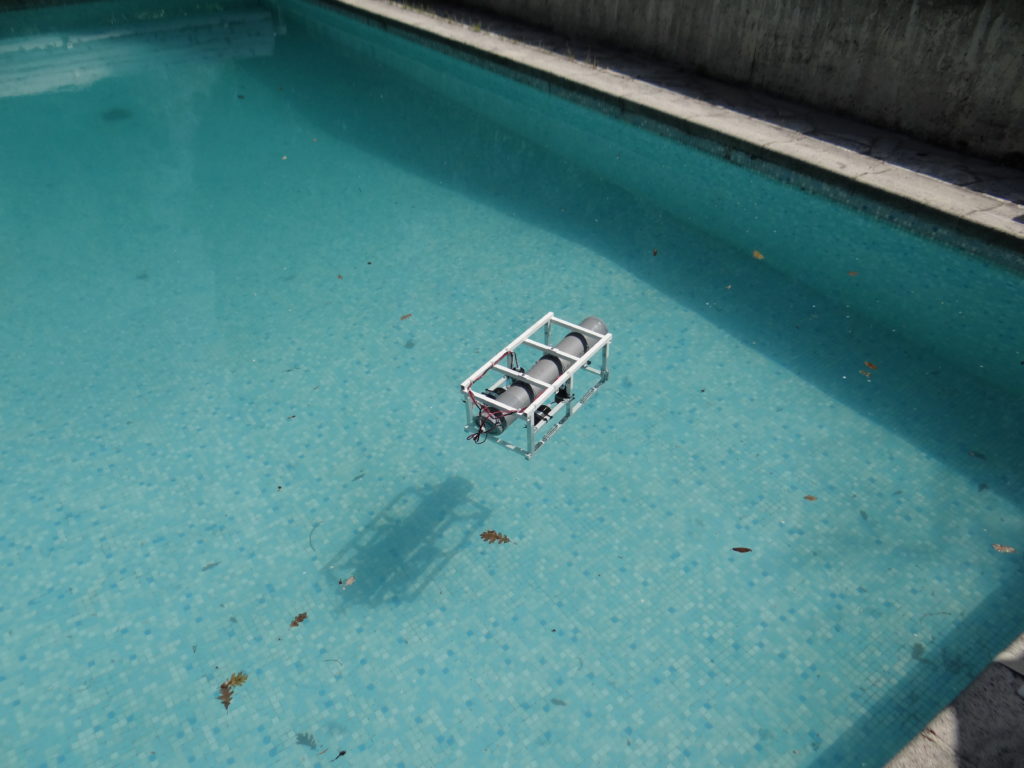
Avec la ceinture de lestage en place, le robot s’éloigne doucement du bord de la piscine et rejoint le milieu, accompagné par Marc qui le surveille. Une petite impulsion sur les propulseurs verticaux et, hop !, il disparaît sous la surface quelques secondes, avant de remonter lentement.
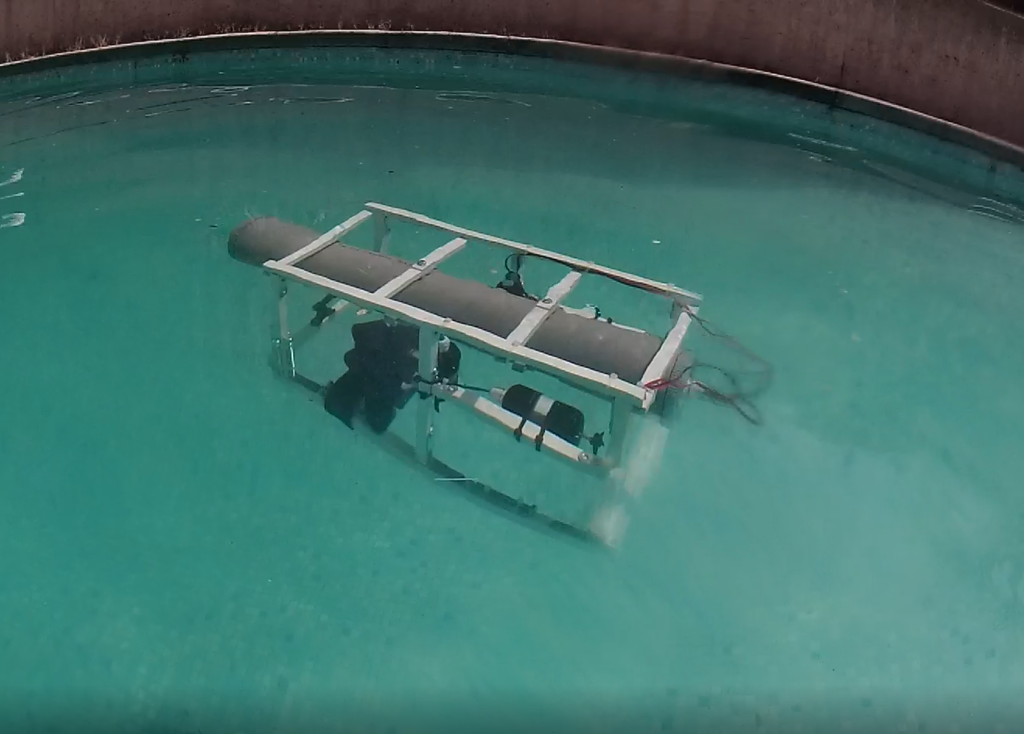
Le ballast interne est vide, donc le robot est légèrement positif : il a tendance à remonter tout seul. Je remplis le ballast et là, le voilà qui se stabilise sans difficulté à 30 centimètres sous la surface. Je me sers alors des propulseurs verticaux pour régler sa profondeur, mais j’atteins rapidement une limite : le signal radio ne porte pas loin sous l’eau !
En effet, à 2 mètres du bord, le robot reste contrôlable en plongée, jusqu’à 1.5m de profondeur. Par contre, dès qu’il s’éloigne, le signal perd en intensité, limitant la profondeur maximum où il reste sous contrôle : à 6m du bord, il ne peut plonger qu’à 50cm avant de perdre le contact.
L’eau est un mauvais isolant pour le courant électrique, ce qui fait que le signal radio est partiellement diffusé par le milieu, en fonction de la fréquence du signal et la concentration en sels et minéraux. Ainsi, dans l’eau douce d’une piscine, mon signal 433MHz arrive à atteindre le fond de la piscine à quelques mètres de l’émetteur, là où un signal à 2.4GHz (typiquement le WiFi ou le Bluetooth) ne dépasseraient pas quelques centimètres. Un signal en 27MHz (typique des amateurs de CB ou de modélisme) est capable de traverser environ 10m d’eau douce ! Mais en eau de mer (donc, conductrice…), c’est une autre affaire !
Vidéo des tests
Vous avez été sages, alors voilà une vidéos des tests réalisés !
Bilan
Le robot a donc correctement réagi aux instructions que je lui ai transmis par radio, même à 1.5m de profondeur. Le ballast a parfaitement joué son rôle d’équilibrage en permettant de régler la densité et de monter / descendre naturellement. Ces test m’ont permis de déterminer le bon lestage à appliquer pour obtenir une flottabilité neutre et un bon équilibrage.
En revanche, il y a un temps de latence dans le programme pour limiter la consommation électrique, ce qui fait que les instructions de déplacements manquent de précision. Avec le lestage, les propulseurs peinent à faire avancer ou tourner le robot : des hélices plus grandes (55mm au lieu de 35mm) pourraient améliorer les performances.
De plus, le principe de contrôle des propulseurs peut être amélioré pour permettre de tourner plus facilement lorsque le robot est en mouvement : actuellement, le robot marque une pause avant d’exécuter l’instruction de tourner.
On a pu se rendre compte que la solution de fermeture avec un bouchon à visser fonctionne, mais… qu’elle n’est pas très pratique ! A chaque test, on devait ouvrir le robot pour vérifier l’électronique et chaque ouverture / fermeture prend du temps. Sans compter qu’il faut vérifier l’étanchéité après chaque ouverture du cylindre, le plus souvent en remplissant les filetages avec de la graisse. Caradoc serait fier de nous !
Et la suite…
Les prochaines étapes pour le robot seront donc :
– une nouvelle solution de fermeture du tube
– des hélices plus grandes pour une meilleure propulsion
– une logique revue pour un meilleur contrôle
– de nouveaux composants pour le rendre autonome (GPS, gyrocompas, pression, sonar…)
– un nouvel agencement des moteurs pour permettre les mouvements latéraux (peut être avec des pods orientables)
– un tube plus grand… pour faire entrer les nouveaux composants !
Je vous remercie d’avoir lu jusque là !
La campagne de tests n’est pas finie : on y retournera à chaque fois qu’un nouveau composant sera ajouté et pour tester le programme autonome. Et pourquoi pas un test en mer ?
A très bientôt pour de nouvelles aventures sous-marines…