11 Septembre 2017
J’ai profité de l’été pour m’enfermer dans un endroit sombre, poussiéreux, sans fenêtre et sans clim : ma cave de 8m², dans laquelle j’ai réussi à dégager à peu près 1.5m² pour mes travaux.
Je travaille donc sur la création d’un premier prototype, avec pour objectifs : valider la technique pour l’étanchéité et valider la conception et l’agencement des composants.
Au menu : beaucoup de PVC, pas mal de colle pour que ça tienne, une touche de polystyrène pour définir la forme de certaines pièces, et une quantité déraisonnable de graisse marine pour combler les vides. Comme le dit l’adage : « Trompe toi vite, trompe toi souvent ». Et… je l’applique avec beaucoup d’insistance ! Mais bon, chemin faisant, ma solution et mes méthodes s’améliorent.
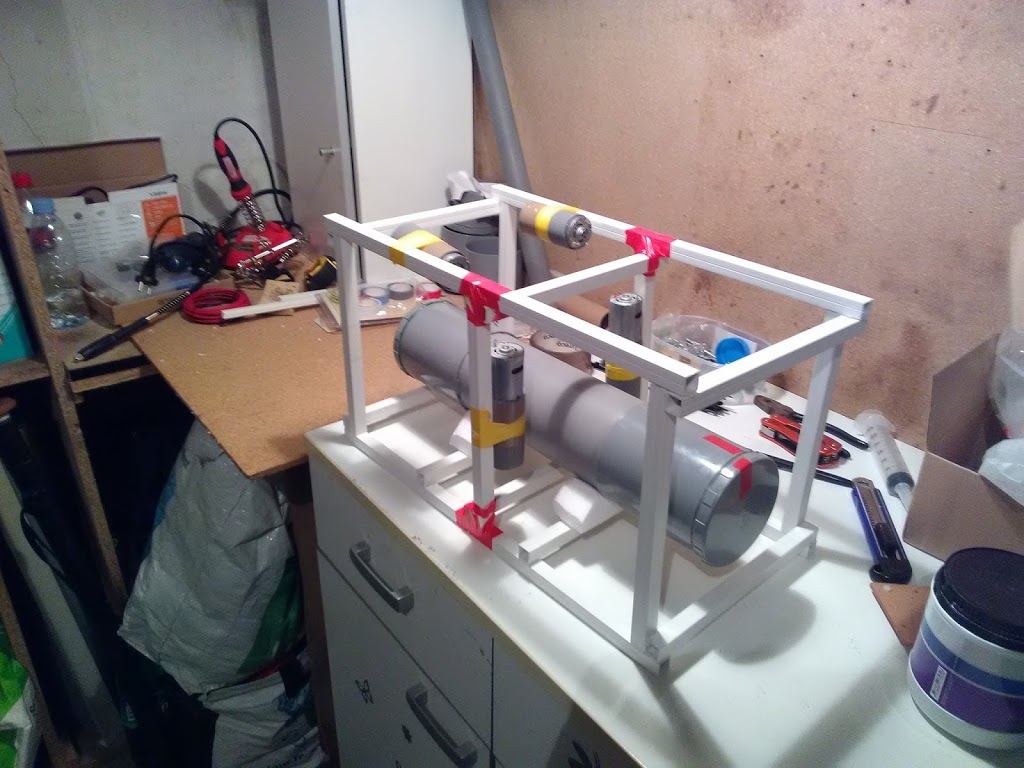
La première version de ma coque étanche avait ‘quelques’ entrées d’eau, comme on peut le voir sur les photos. Je travaille encore dessus, afin de changer la solution de fermeture du tube.
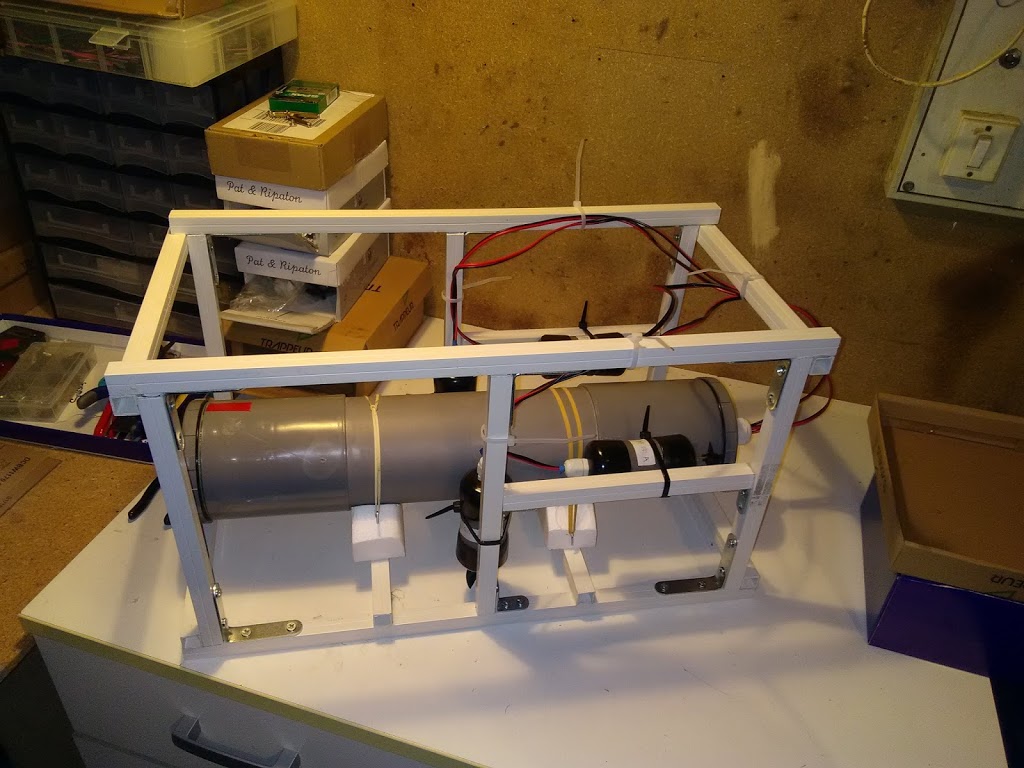
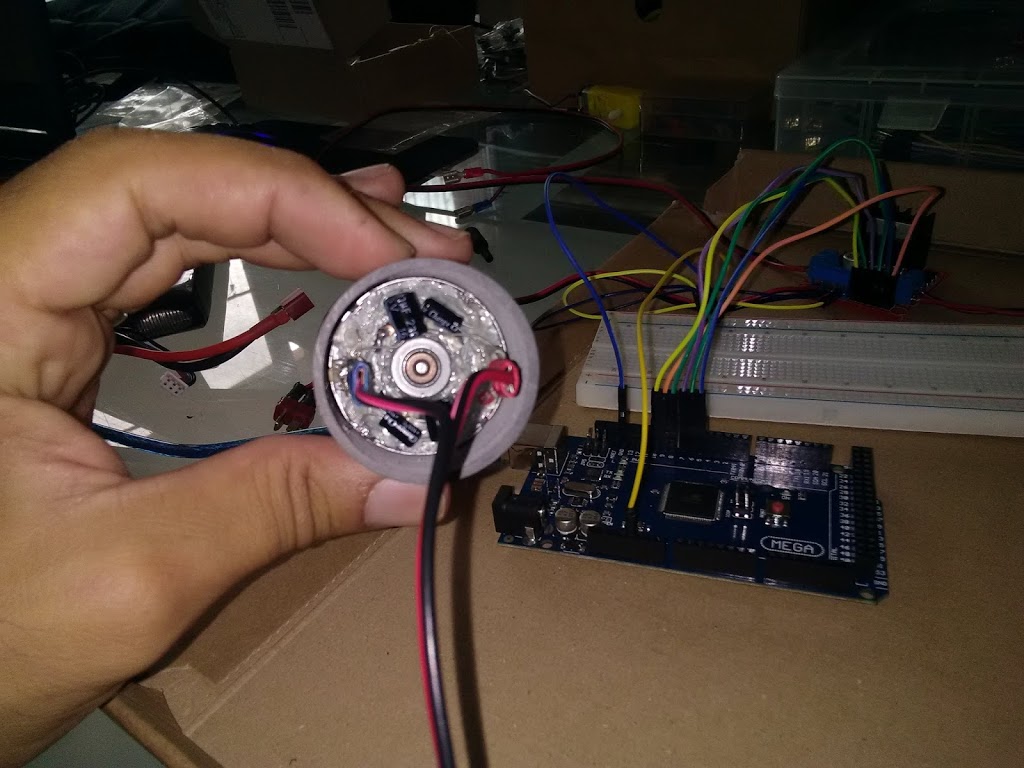
Les moteurs électriques ont été enroulés dans du scotch et coulés dans de la colle chaude pour fermer les ouvertures dans la carcasse. Puis, je les ai inséré dans un tube de PVC, que j’ai du réusiner pour l’occasion…
Ensuite, j’ai appliqué une certaine quantité de graisse marine, avant de boucher les extrémités avec un bouchon de PVC, avec un presse étoupe IP68 pour le passage des câbles d’alimentation.
Le tout est étanche et même si de l’eau entre dans le bloc, elle doit franchir la graisse, la colle et le scotch avant d’atteindre le moteur. Là, si ça arrive, l’eau c’est MacGyver 😉
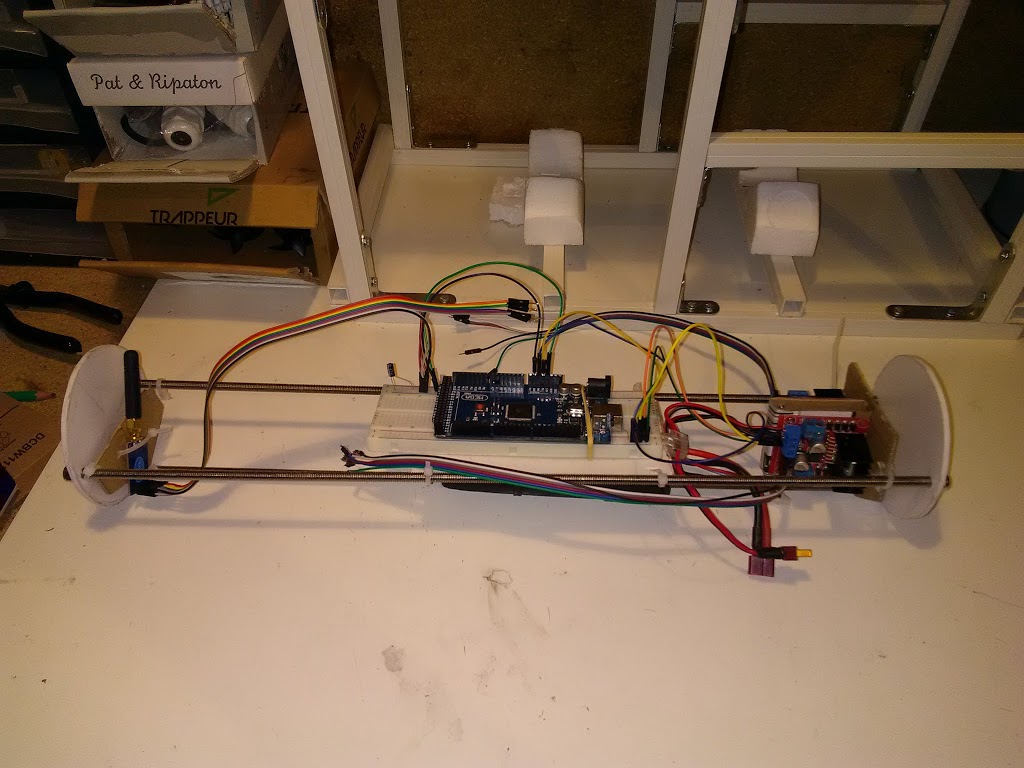
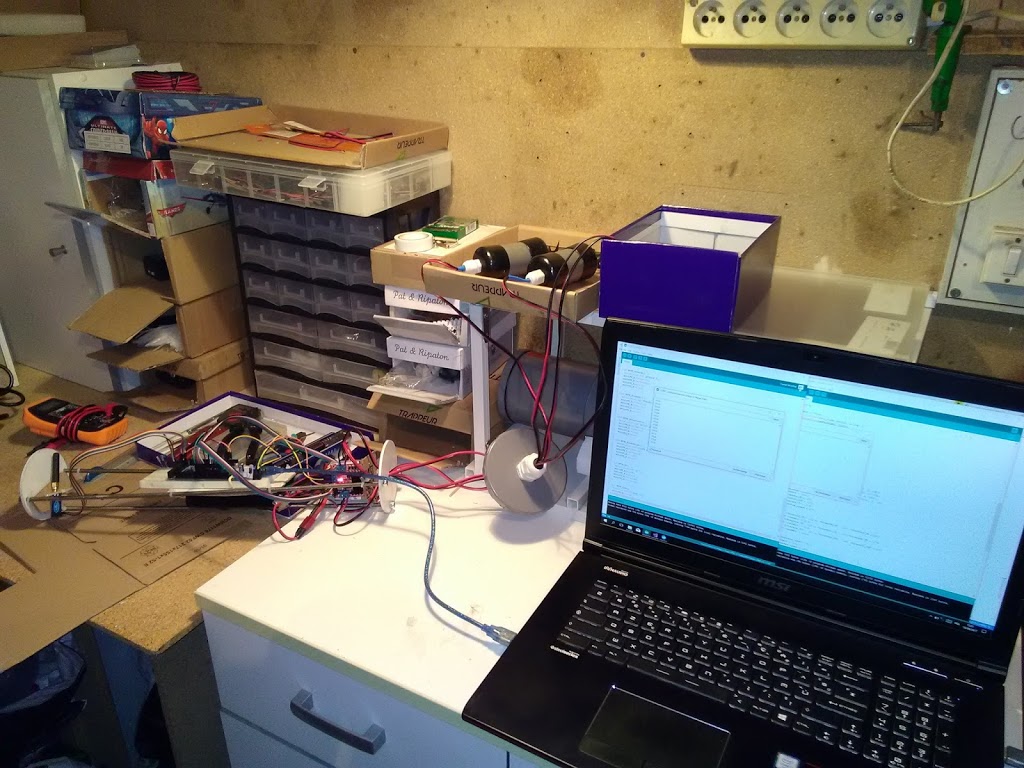
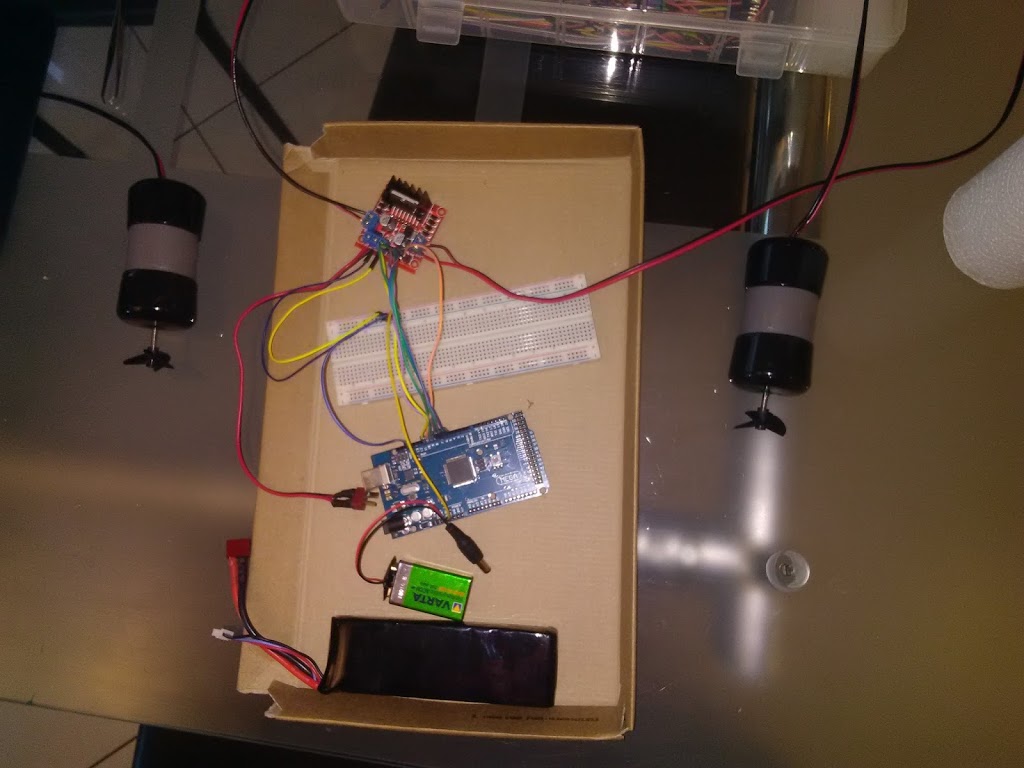
En ce qui concerne les entrailles de la bête, une Arduino contrôle les moteurs, avec 2 modules intermédiaires permettant de réguler l’intensité entre la batterie et les 4 moteurs. Pour l’instant, je la contrôle avec une radio 433MHz, qui ne marchera pas au delà de 1-2m sous l’eau, mais qui sera suffisant pour ce premier proto. La prochaine étape consistera à ajouter un ballast souple et une pompe, pour permettre au robot de plonger. Et donc, de perdre le signal radio. Mince…
Comme je l’ai déjà expliqué à certains, je ‘réoriente’ mon projet pour l’axer sur une mission et des valeurs qui me correspondent plus : la préservation de l’environnement et du patrimoine. L’entretien des coques de navire entre donc dans la mission ‘environnement’, tandis que j’ouvre mon projet vers d’autres secteurs : exploration, archéologie, récupération des déchets plastiques, missions scientifiques…
Voilà où j’en suis. Je pense mettre le proto à l’eau (enfin… dans la baignoire, puis dans une piscine) avant la fin du mois. Après… l’eau va commencer à être froide !