
Bonjour à tous,
Maintenant que NAUVA dispose d’un peu plus d’espace, je peux reprendre l’assemblage et les tests des différentes parties du robot.

Tests de la propulsion
Après tout ce temps passé dans une boîte, j’ai enfin assemblé les moteurs dans leur carénage. Auparavant, je colmatais les trous dans les moteurs avec du scotch et je complétais avec de la graisse. Du coup, j’en ai profité pour ajouter un joint plat, fabriqué main s’il vous plaît, pour assurer une meilleure étanchéité. Cette solution là est nettement plus propre et a l’avantage d’être facilement démontable / remontable. Notez que je me suis amélioré sur la précision de réalisation depuis ces photos 😉


Ensuite, j’ai procédé à quelques ajustements sur la longueur de câble, pour limiter les efforts et permettre de facilement les sécuriser sur la structure. Jusque là tout va bien !
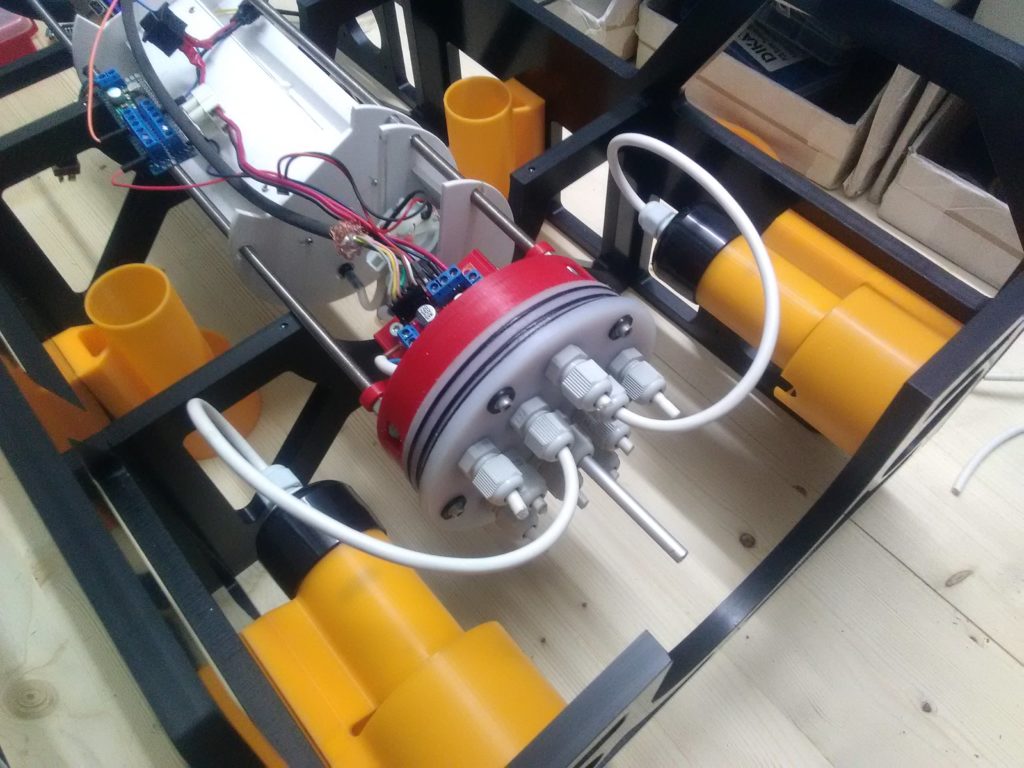
Tout est en place : alimentation des cartes en 5V et alimentation des moteurs en 12V, l’interface Raspberry et Arduino fonctionne. Je peux enfin faire tourner les hélices !
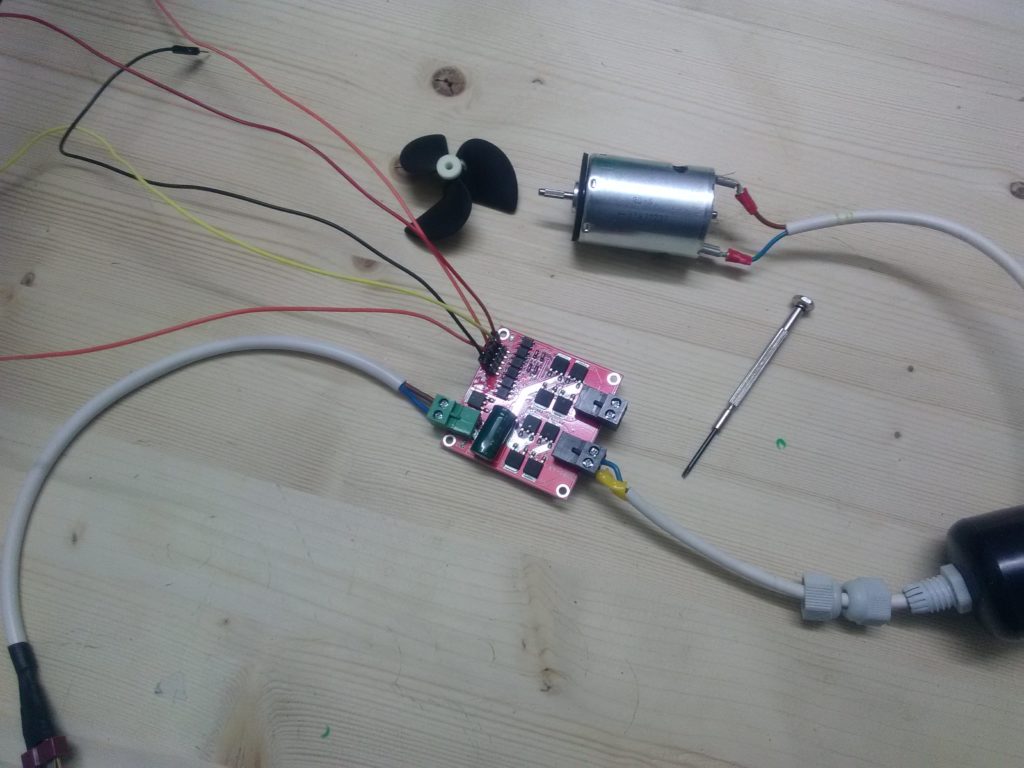
Après quelques essais, je déchante un peu : la carte de contrôle des moteurs chauffe beaucoup… Au bout de quelques secondes de fonctionnement, les moteurs s’arrêtent et la carte est brûlante (>70°C). Oups ! Visiblement, la carte (à base de L298N) n’aime pas vraiment les démarrages et arrêts intempestifs, qui lui font voir des courants assez forts. Lorsqu’elle chauffe trop, elle se met en PLS et tout s’arrête : elle a besoin de quelques minutes pour refroidir.
Si ça ne faisait pas ça lors des tests précédents, c’est parce que je faisais tourner les moteurs un par un, avec suffisamment de temps entre chaque test de fonctionnement pour que la carte revienne à température ambiante. Après quelques recherches sur internet, je comprends que cette technologie n’est pas adaptée à la puissance et au fonctionnement des moteurs. Pas le choix, il faut changer de contrôleur.
Nouveaux contrôleurs
J’opte pour une carte permettant de faire passer 7 Ampères par moteur, mais qui présente l’avantage d’avoir le même principe de contrôle que la précédente. Je reçois ma commande en un temps record et je peux aussitôt les tester en conditions. Par contre, elle est légèrement plus grande, ce qui m’impose de redessiner et re-imprimer de nouveaux supports !

Le résultat est… surprenant : les moteurs n’ont jamais tournés aussi vite, et la carte ne semble même pas chauffer ! Je suis obligé de réduire la vitesse de rotation, simplement parce que les vibrations font trembler l’établi tout entier ! D’ailleurs, si je n’arrive pas à faire naviguer le robot, je pourrais tout à fait le transformer en drone aérien… 😀
Donc, c’est un mal pour un bien : j’ai enfin trouvé une solution simplement parfaitement adaptée pour cette utilisation. Le contrôle de la carte est simple, l’interface sans ambiguïté et les performances sans commune mesure avec celles qu’elles remplacent.
A très bientôt pour la suite de l’assemblage !



