Dans le domaine de l’exploration sous-marine, l’utilisation de robots autonomes en est encore aux balbutiements…
Dans les années 60, les instituts scientifiques (Ifremer, Comex, NOAA…) ont développé des mini sous-marins habités, capables de plonger à grande profondeur. Par exemple, les explorateurs Jacques Piccard et Don Walsh ont utilisé le bathyscaphe Trieste de 180T, fabriqué par le père de Jacques, pour tenter d’atteindre en 1960 le fond de la fosse des Mariannes, réalisant une plongée à 10,916m… En 2012, c’est le réalisateur / explorateur James Cameron qui utilise le Deep Sea Challenger de 12T pour atteindre la profondeur de 10,898m.

Ces plongées habitées sont coûteuses, compliquées et extrêmement risquées. Imaginez un peu James Cameron, qui mesure pas moins d’1,88m, enfermé dans une bulle d’1m de diamètre pendant… 10h ! En sachant qu’au fond de l’océan la pression est d’environ 1100 atmosphères, la moindre erreur est potentiellement fatale.
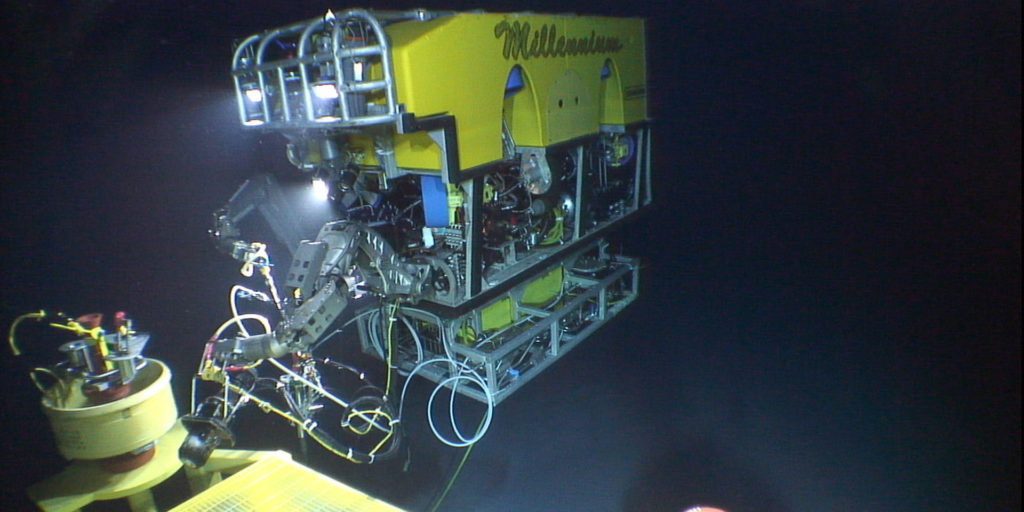
Pour éviter ces contraintes et limiter les coûts, des appareils contrôlés à distance (Remote Operated Vehicle – ROV), reliés par un câble au bateau et à l’équipage, sont couramment utilisés pour réaliser diverses tâches, comme inspecter mais aussi intervenir, grâce à des pinces robotiques. Bien que les avantages soient nombreux, il est encore nécessaire de mobiliser un pilote, mais aussi un bateau et tout son équipage, pour déployer ce genre d’engins.
Alors, depuis quelques années, plusieurs solutions d’exploration robotiques ont été étudiées, notamment par l’utilisation de robots autonomes (Autonomous Underwater Vehicle – AUV). Ces robots peuvent donc être déployés, réaliser leur mission avec peu ou sans intervention humaine, et être récupérés lorsque leur batterie est vide (ce qui peut représenter plusieurs jours d’autonomie pour les planeurs sous-marins).
Dans cet article, je m’intéresse particulièrement à une branche de la robotique, qui s’inspire de la nature pour trouver des solutions : le bio-mimétisme. En effet, les animaux évoluent en permanence et leur forme est donc bien plus adaptée à leur environnement, grâce à des milliers, voire millions, d’années d’essais et d’erreurs.
Il y a le plus classique : dans le ciel, il y a les oiseaux, dans la mer, il y a les poissons ! Alors, plusieurs projets ont pour objectif de mimer le déplacement des poissons, pour le loisir, mais aussi pour l’exploration sous marine. Un robot poisson peut ainsi observer la faune et explorer les fonds marins sans inquiéter les habitants. (Source Le Monde)
Notez que certains modèles sont déjà disponibles dans le commerce…
Plus surprenant, des scientifiques ont reproduit le mode de déplacement de la tortue et permettent ainsi à un petit robot de se déplacer sans contraintes sur les 3 axes. L’objectif, une fois de plus, étant de maximiser la mobilité en limitant l’impact sur l’environnement, cette fois ci en évitant de soulever de la vase qui pourrait obstruer le champ de vision. (Source Futura Sciences)

Toujours pour l’exploration sous marine, mais avec une forme moins… sympathique, des scientifiques ont reproduit le mouvement du serpent ! Cette forme allongée lui permet de se faufiler et d’évoluer dans des espaces réduits. (Source Futura Sciences)
Encore plus surprenant, des scientifiques ont mis au point un robot sous-marin souple, en suivant le modèle du poulpe. Il n’y a donc plus de structure rigide, mais ‘juste’ des poches souples qui se gonflent ou se vident successivement pour actionner le déplacement du corps en silicone. (Source Sciences et Avenir)

A quand un monde aquatique à la ‘WestWorld’ ? Ça serait moins polémique et problématique que d’enfermer des animaux marins dans un parc… Qu’en pensez vous ?