Quelques voies d’eau !
Décidément, on dirait que c’est une habitude… Avec tout ce qu’il est tombé ces dernières semaines, je m’en sors plutôt pas mal : à peine quelques gouttes ont trouvé leur chemin jusqu’au plafond de la cave, juste de quoi remplir un demi seau en 2 semaines.
Oui mais voilà, ces gouttes ont décidé d’un commun accord de tomber à quel endroit ? Au milieu ? Dans un coin ? Nenni : au beau milieu de l’établi, juste à la verticale du robot 🙁
Je sais, vous allez me dire que c’est normal pour un sous marin d’être mouillé. Mais en général, on ferme les écoutilles avant de plonger ! Heureusement, je m’en suis aperçu rapidement et je n’ai pas eu de dégâts…
En attendant…
Du coup, en attendant, j’en ai profité pour améliorer mon espace de travail ! Tout d’abord, un panneau mural pour y accrocher les outils. Notez, c’est pas mal aussi pour éviter de faire tomber des petites pièces derrière l’établi 🙂
Ensuite, une étagère par dessus. Ça dégage de l’espace pour le travail et je peux y ranger tout un tas de trucs plus utiles les uns que les autres. En gros, du vrac.

J’étais chaud, la perceuse était branchée, j’ai enchaîné avec une étagère qui vient combler l’espace entre l’établi et le mur. Là aussi, bien pratique pour éviter de perdre des machins de ce côté là, en plus de fournir un bel espace pour mettre l’électronique à portée de main !

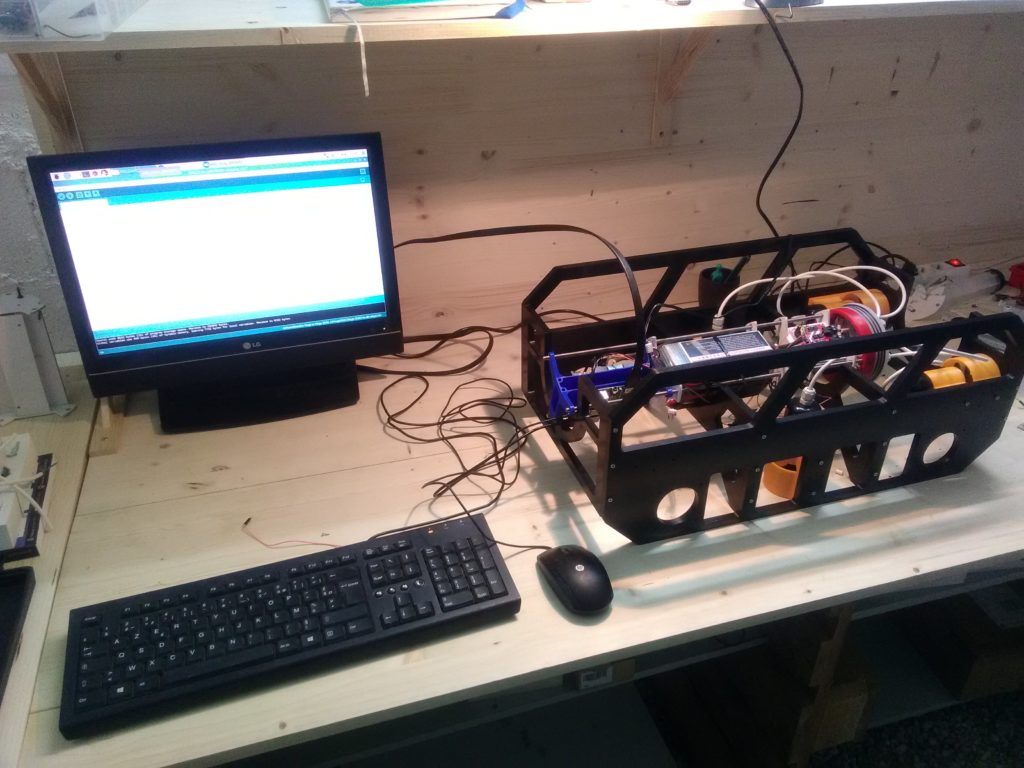
Je dispose maintenant d’une solide réserve de trucs et de machins disposés (en vrac) dans des boîtes (bien rangées) ! En plus, la partie gauche est dédiée à l’électronique et la programmation, tandis que la partie droite sert plutôt à la mécanique. On peut dire que je suis bien installé.
C’est pas tout ça…
Oui bon, je ne suis là non plus pour faire du bricolage ! Alors, je remets la bête sur l’établi et on continue. Tout d’abord, je complète le câblage des propulseurs axiaux et verticaux.
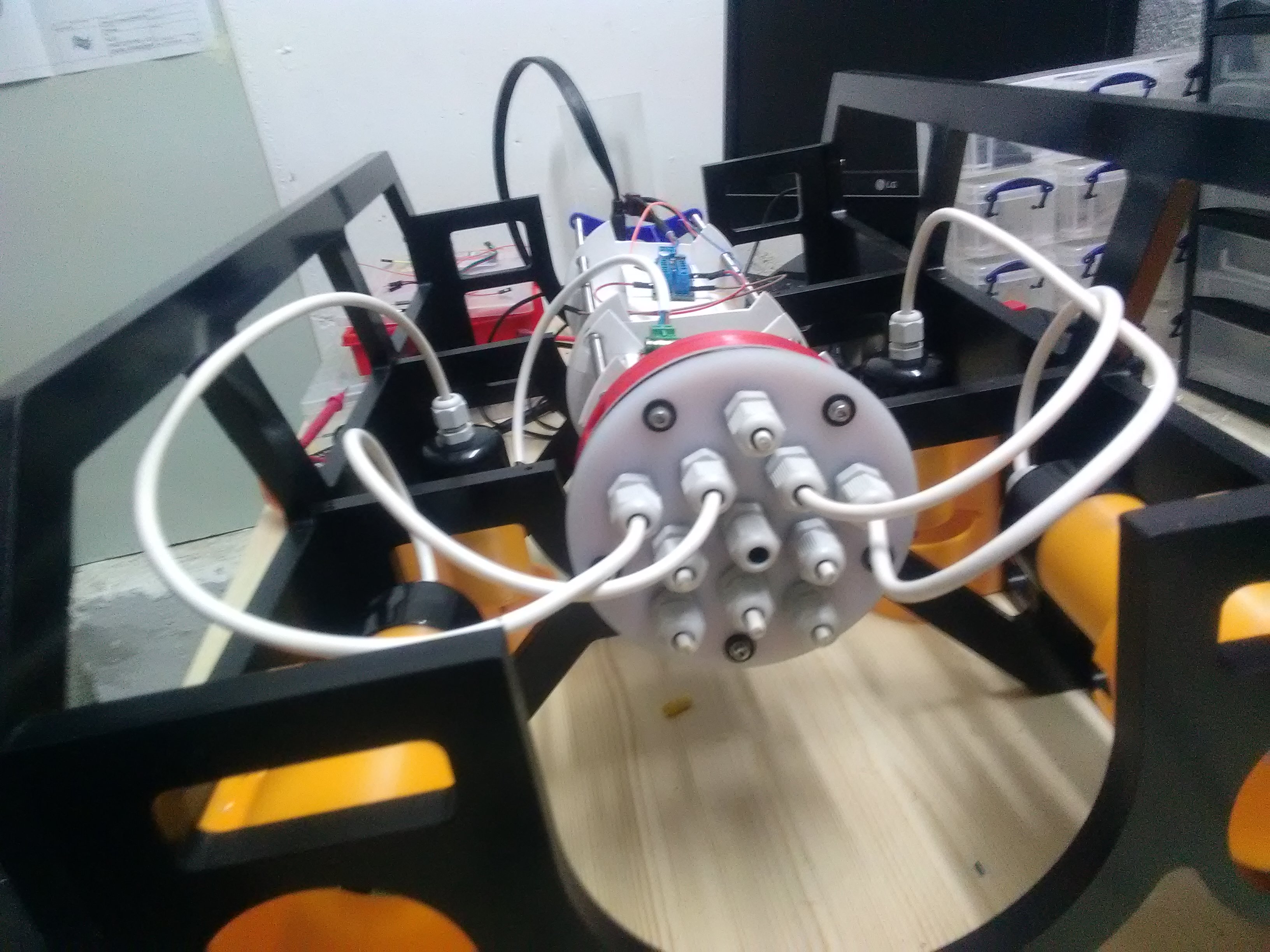
Par la même occasion, j’ai fabriqué un support pour les nouvelles cartes de contrôle moteurs, plus grandes que les anciennes. Pour l’instant, c’est simplement des morceaux de plastiques collés, mais mon camarade Brian est déjà en train de l’imprimer 🙂
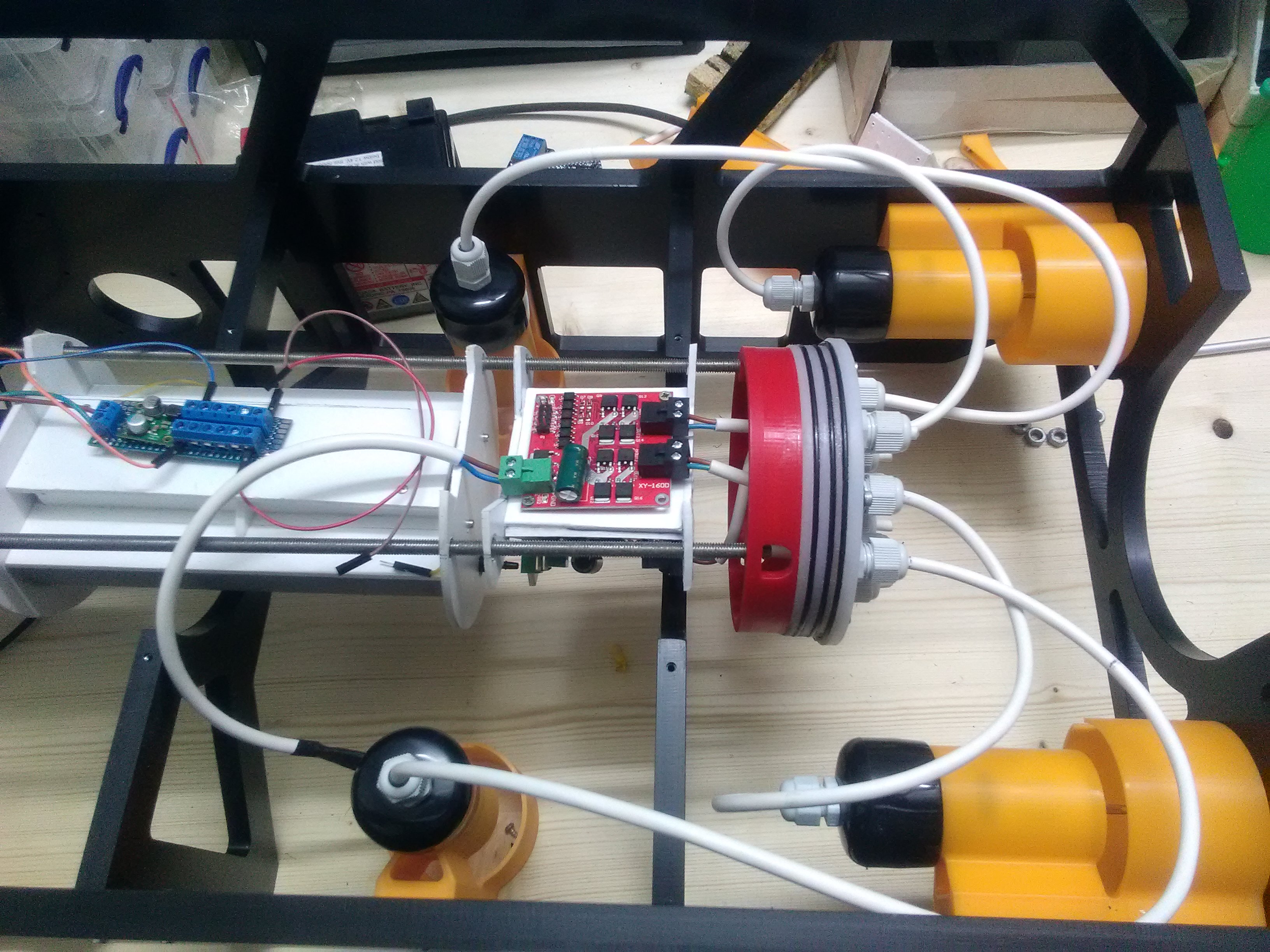
J’ai aussi décidé de changer de solution de ballast : cette fois ci, un ballast à piston de 200ml, en utilisant une… seringue. Oui, c’est low cost ! Le principe est simple : un moteur fait tourner un engrenage, qui fait avancer / reculer une tige filetée attachée au piston, qui va aspirer ou rejeter l’eau.
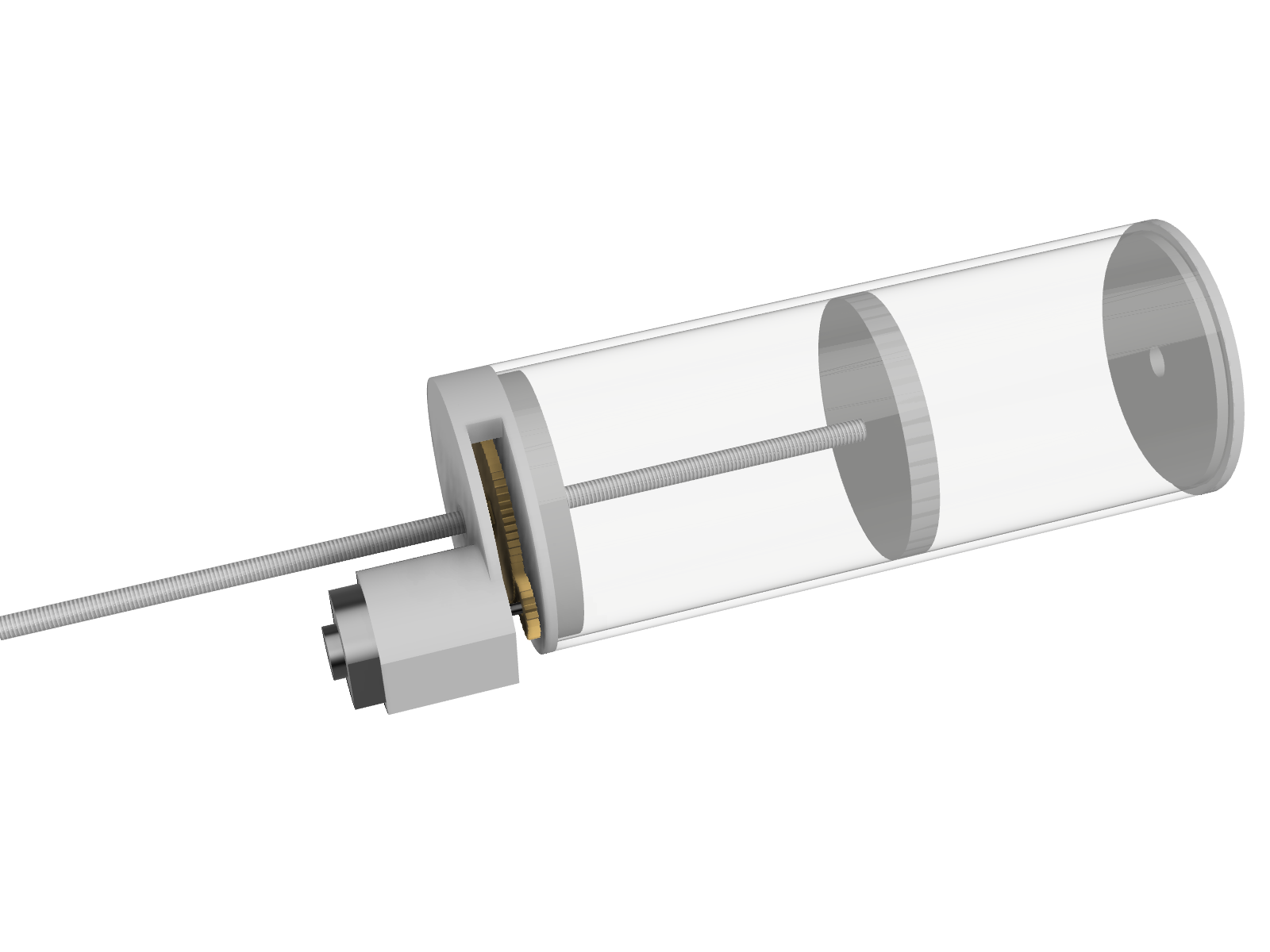
Cette solution prend un peu plus de place, surtout à cause de la tige filetée qui recule, mais ça tient mieux la pression et ça permet de mieux contrôler le niveau du ballast.
Il faut aussi fabriquer un nouveau support, sur lequel je fixerai les 2 batteries et qui laissera un peu plus d’espace pour faire passer les câbles entre l’avant et l’arrière de la partie étanche. Comme d’habitude, je commence par une version bricolée en collant et vissant des bouts de plastique découpés, en attendant de terminer le modèle 3D et d’en imprimer une version propre.

Avec un peu de montage, de câblage et d’assemblage, voilà ce que ça donne en situation… Ça commence à être bien rempli ! 😀
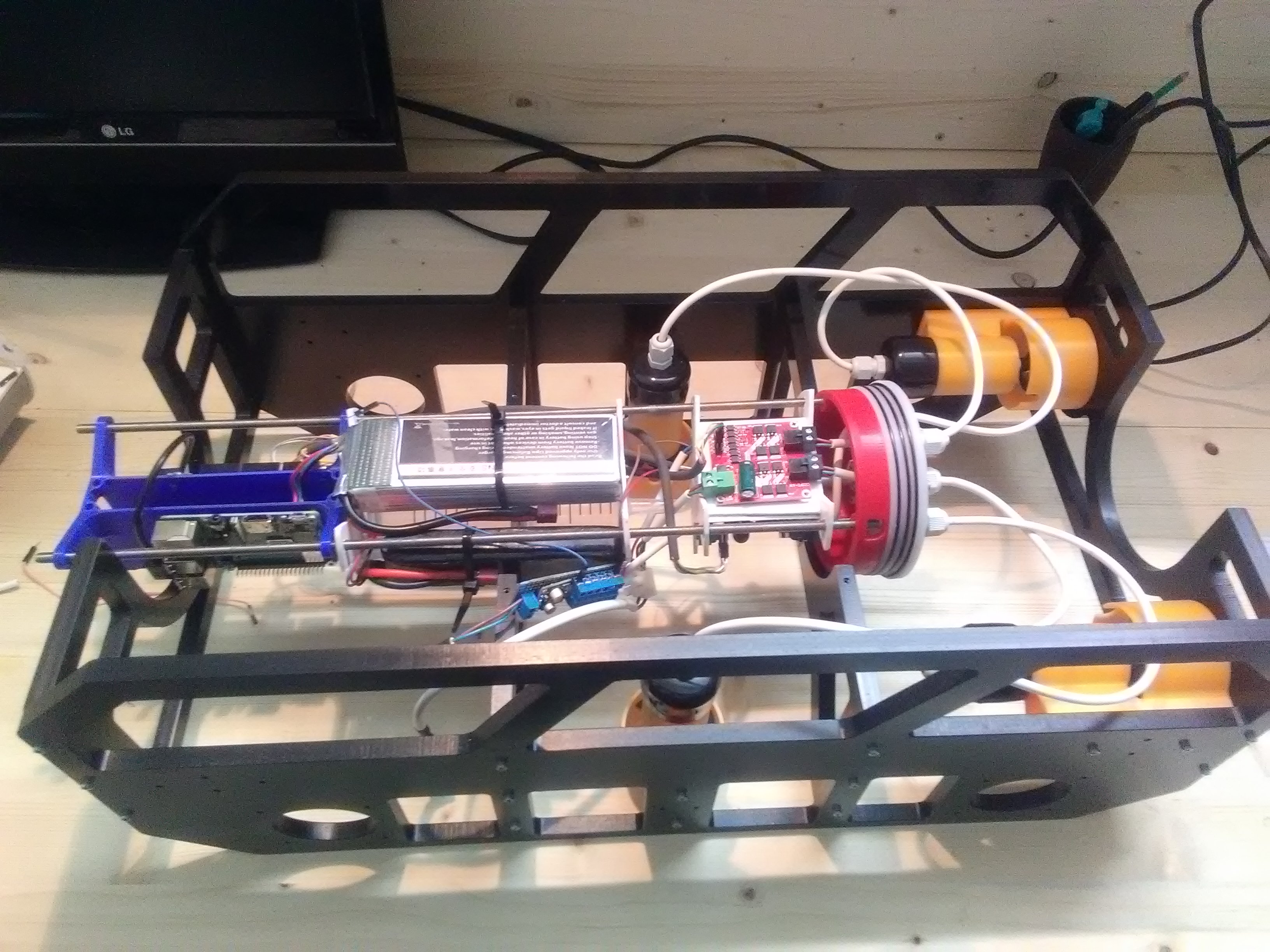
Il ne manque plus que les propulseurs latéraux, que Brian doit ré-imprimer suite à un léger problème de cote… fausse. Oups.
Je suis sur la bonne voie : quand le ballast sera prêt, le sous marin sera prêt à naviguer de nouveau ! Mais ça, c’est une autre histoire 😉
A bientôt !