Qui n’a jamais joué à se déguiser en robot quand il ou elle était enfant? Pour ma part, je récupérais les boîtes de lessive et de céréales en carton, je les enfilais sur les bras, les jambes et la tête : voilà, j’étais devenu une super machine. Je ressemblais carrément à ce petit garçon :

Que serait un robot sans bras équipés de doigts, d’une pince ou d’un outil, qui lui permettrait d’interagir avec son environnement (comme éliminer l’espèce humaine) ? Pas de bras, pas de chocolat et pas de jugement dernier.
Les ROV (Remote Operated Vehicle) utilisent souvent un ou plusieurs bras pour manipuler des vannes ou attraper divers objets sous l’eau (voir cette vidéo, par exemple).
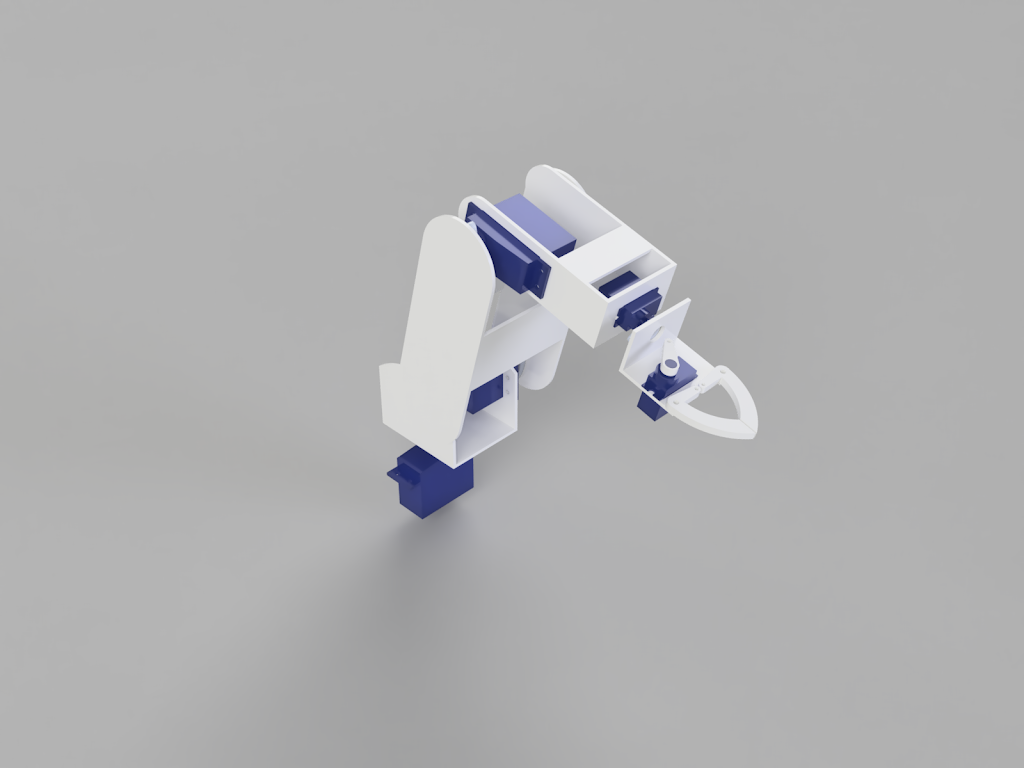
Alors, je vais commencer par concevoir un bras à mon robot ! Il ressemblera à quelque chose comme ça :

Modèle 3D avec Autodesk Fusion 360
Première étape : le dessin. Je vous épargnerai les ébauches au crayon sur mon cahier pour passer directement au modèle 3D. Je l’ai réalisé avec le logiciel Autodesk Fusion 360, qui est gratuit pour les étudiants et les start-ups.
Malheureusement, Fusion 360 ne permet pas encore d’animer les articulations pour générer une vidéo. Je peux juste tourner autour, faire bouger / apparaître / disparaître les pièces, mais sans tenir compte des contraintes. Il faudra attendre une éventuelle mise à jour, ou alors, que j’en fasse une animation image par image, en bougeant chaque pièce séparément. Je vous aime bien, mais y’a des limites !
Création



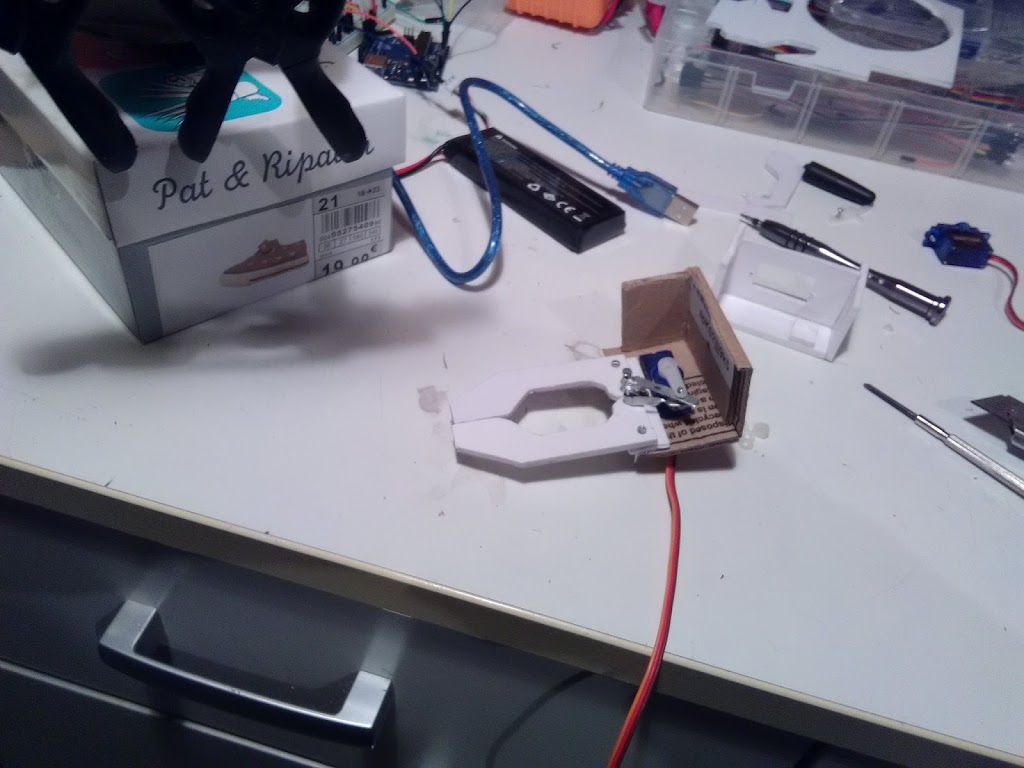

Test et vidéo
Le contrôle se fait avec la commande de la PS2, en utilisant les joysticks pour contrôler les mouvements des servos :
Améliorations
Parmi les améliorations possibles, je pense ajouter un degré de liberté : la flexion du poignet pour faciliter la préhension d’objets et avoir ainsi 6 degrés de liberté.
De plus, je pense à terme réaliser les éléments en plastique, par exemple en impression 3D. Ca me permettra de tester cette méthode de fabrication, qui me sera sûrement utile pour plein d’autres applications.
A très bientôt pour de nouvelles aventures !