Bonjour à tous !
Avant d’entamer le pentathlon foie gras – champagne – belle maman – petits fours – cadeaux… voilà quelques nouvelles du projet.
Un peu de retard
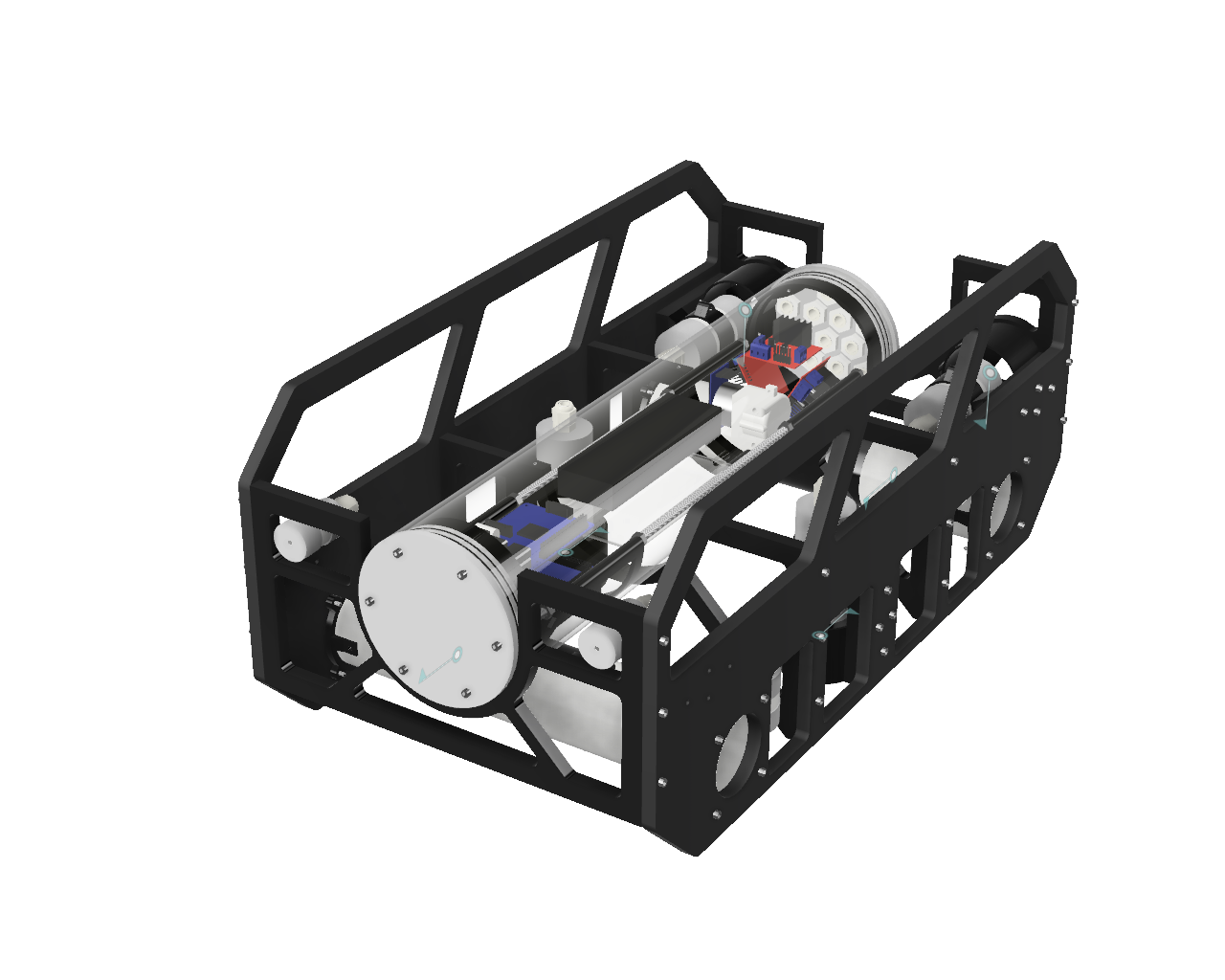
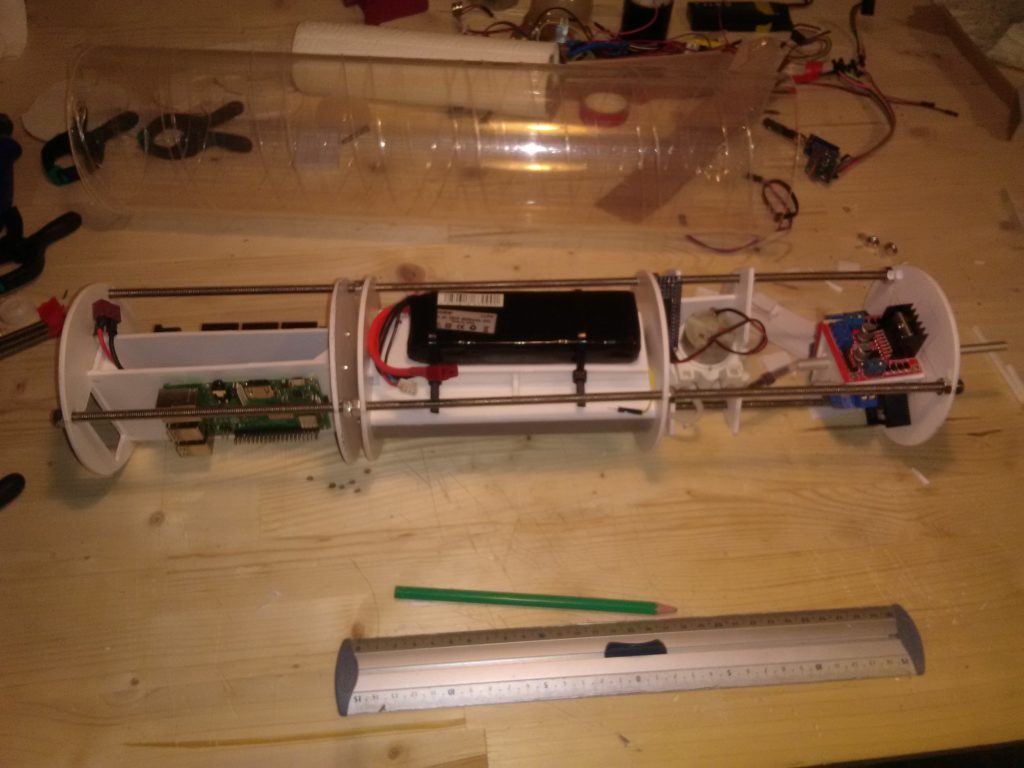
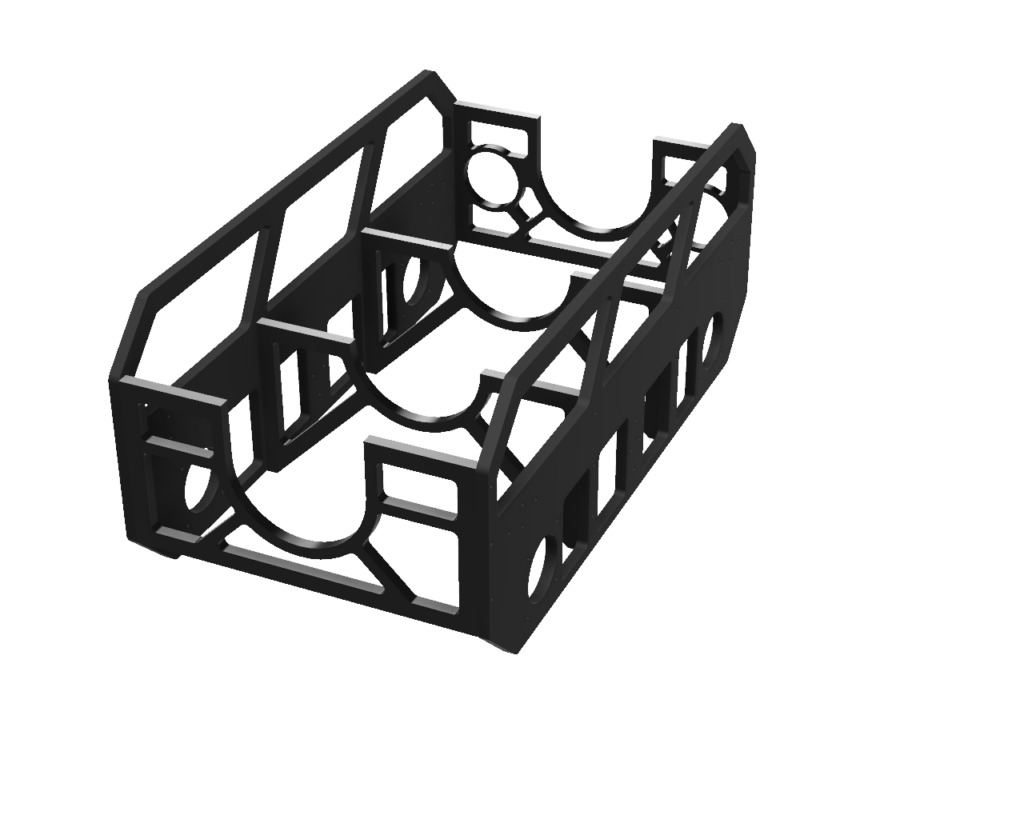
La fabrication du prototype a pris un petit poil de retard ces derniers temps: l’hiver est là et les imprimantes 3D ont trop froid pour imprimer. Elles hibernent, si on les laisse faire 🙂 Du coup, je n’ai pas pu faire les tests d’étanchéité, car il manquait les pièces de jonction entre les bouchons et le support d’électronique interne.

Heureusement, Brian (mon imprimeur en chef) a trouvé une solution et commence à bosser sur la prochaine série de pièces.

Braaaain !
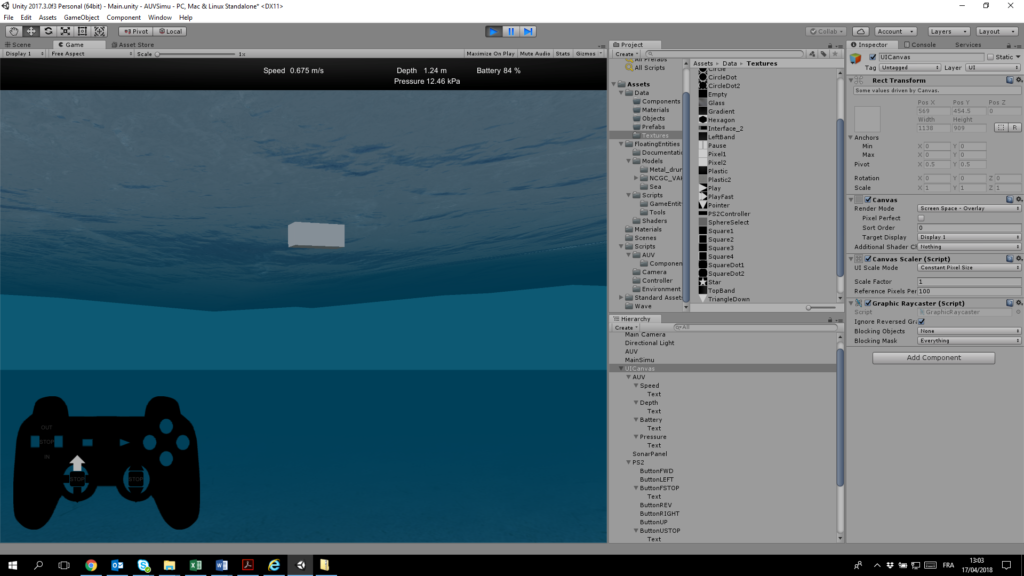
Côté programmation, en revanche, il y a eu de gros progrès ces derniers temps : j’ai complètement ré-écrit les programmes pour l’Arduino et pour la Raspberry, avec pour objectif d’améliorer leur interface.
Et le résultat est plus que satisfaisant : j’ai réussi à les faire échanger des données et des instructions dans les deux directions, et à capturer un certain nombres d’erreurs, qui sont enregistrées sans impacter le fonctionnement du programme. La Raspberry collecte les données fournies par l’Arduino, les enregistre sur une carte SD, les analyse et prend des décisions en fonction, puis donne les instructions à l’Arduino, qui traduit les ordres pour les moteurs et actionneurs.
Ça ne parle pas à tout le monde, alors en résumé : cette étape était fondamentale pour le reste du projet, car c’est l’architecture du cerveau de la machine qui vient d’être validée. Je peux maintenant développer l’intelligence du robot et comment il va exécuter les missions et réagir à son environnement.
La comm’
Je ne suis qu’un ingénieur et pas forcément un bon communicant… Depuis le début du projet, je n’avais pris le temps de réaliser une plaquette de présentation du produit et des services. Mais, avec l’aide et les conseils de quelques amis, je m’y suis mis sérieusement et je ne suis pas mécontent du résultat.

J’espère pouvoir vous la présenter bientôt, n’hésitez pas à me faire part de vos idées et commentaires !
C’est tout pour aujourd’hui ! En attendant la suite, NAUVA vous souhaite à tous un très joyeux Noël, ainsi qu’une excellente fin d’année ! On se reverra en 2019 😉