
Le travail sur la seconde version du prototype continue !
Améliorations du Prototype v2
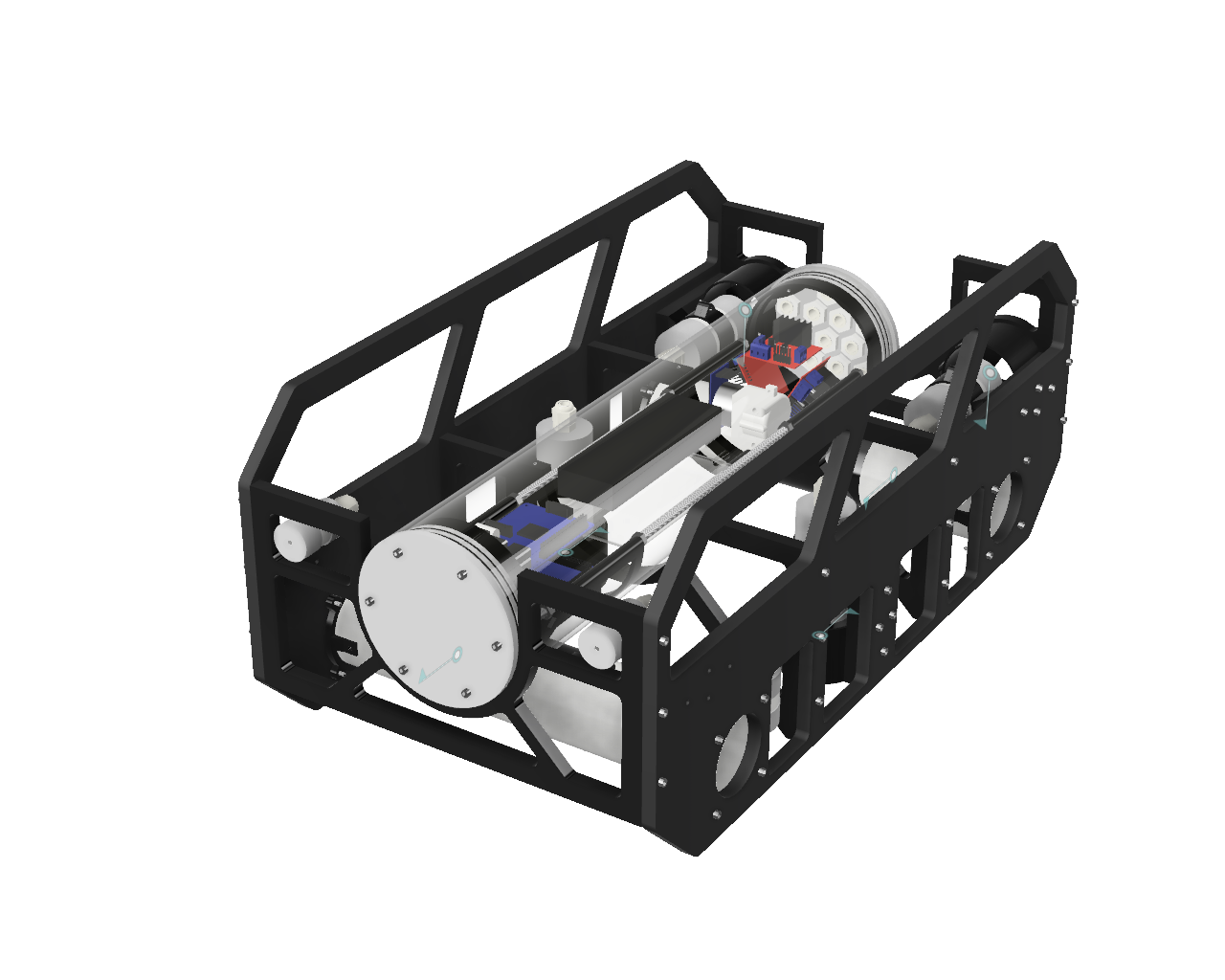
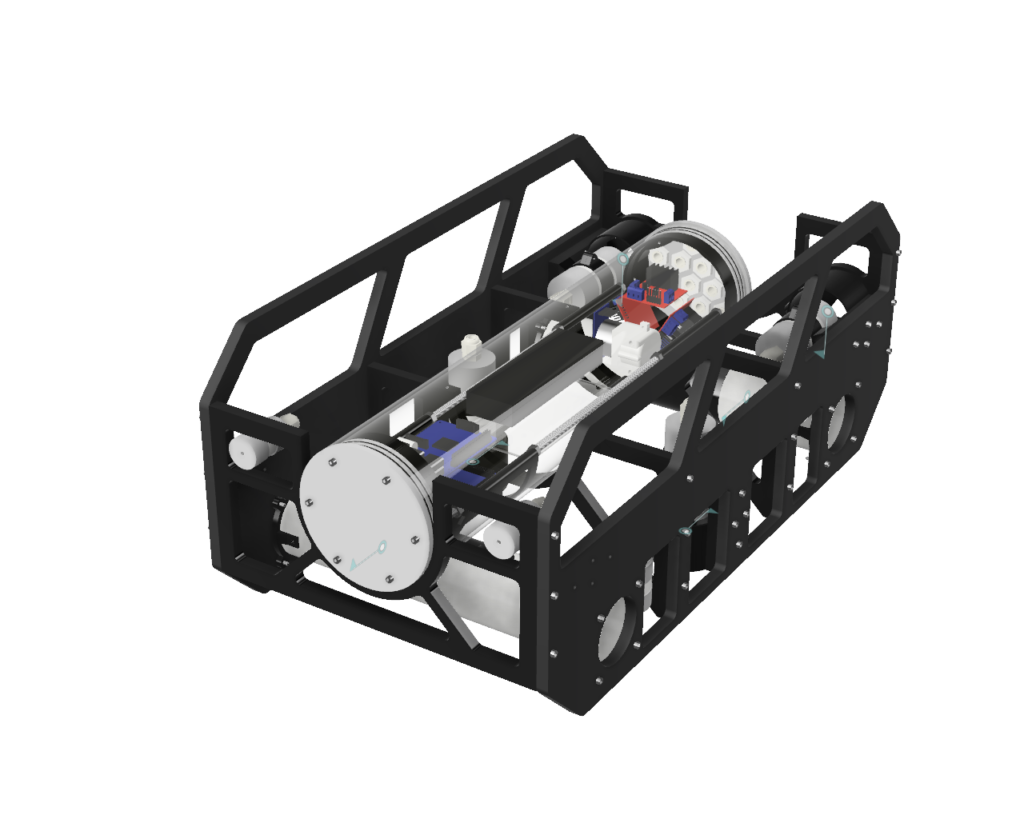
Comme vous pouvez le voir, cette nouvelle version dispose de nombreuses améliorations par rapport à la précédente. Voilà un bref résumé :
Un nouveau cylindre étanche, plus large (120mm au lieu de 100mm), composé d’un tube en plexiglas et fermé par deux bouchons. Le système de fermeture a été complètement revu, avec double joint toriques pour l’étanchéité. Le tout sera plus simple et plus efficace, permettant aussi de faire passer plus de câbles au travers des bouchons de fermeture. Cette nouvelle solution laisse plus de liberté pour installer des instruments dans et en-dehors de la partie étanche.
La forme générale, la structure et le support des propulseur ont été complètement changés, avec pour objectifs de faciliter l’installation des composants (lampes, propulseurs, sonar…) et la manipulation du drone. Deux propulseurs latéraux ont été ajoutés, pour permettre au drone de se déplacer ‘en crabe’ et de pivoter sur place.
Pour ceux qui aiment les images qui bougent, voilà une animation du nouveau modèle 3D du prototype :
Télécommande
Du côté de la télécommande, j’ai enfin pris le temps de me débarrasser du montage expérimental, pour le remplacer par un circuit imprimé (soudé par mes soins…). La carte Arduino Uno a été remplacée par une Nano plus compacte. L’idéal serait de réaliser un boitier sur-mesure, probablement en impression 3D ! Pour l’instant, la carte est fixée de manière très professionnelle avec un élastique sur la manette, mais ça marche. Voilà déjà le résultat :


Electronique
L’image ci-dessous montre les nouveaux éléments en cours d’assemblage :
- un sondeur à ultra-sons pour donner la distance par rapport au fond;
- un capteur de pression pour déterminer la profondeur sous la surface de l’eau;
- un RaspBerry Pi 3 B+, qui réalisera les calculs en temps réel des données transmises par les différents instruments;
- une antenne GPS;
- une centrale inertielle 9 axes;
- de nouvelles hélices de 55mm de diamètre (les anciennes mesuraient 35mm), avec un adapteur d’axe pour les fixer sur les moteurs électriques;

Le module de positionnement combiné (GPS et centrale inertielle) est en cours de développement. Le GPS fonctionne correctement et s’interface sans trop de complication avec la carte Arduino ou RaspBerry. L’antenne servira pour obtenir une position absolue lorsque le robot sera en surface.
Cependant, la centrale inertielle est moins coopérative et nécessite un filtrage des données mesurées (accélération, gyroscope et champ magnétique) très sensible. Il reste encore un peu de développement pour en tirer une position et une orientation satisfaisantes…
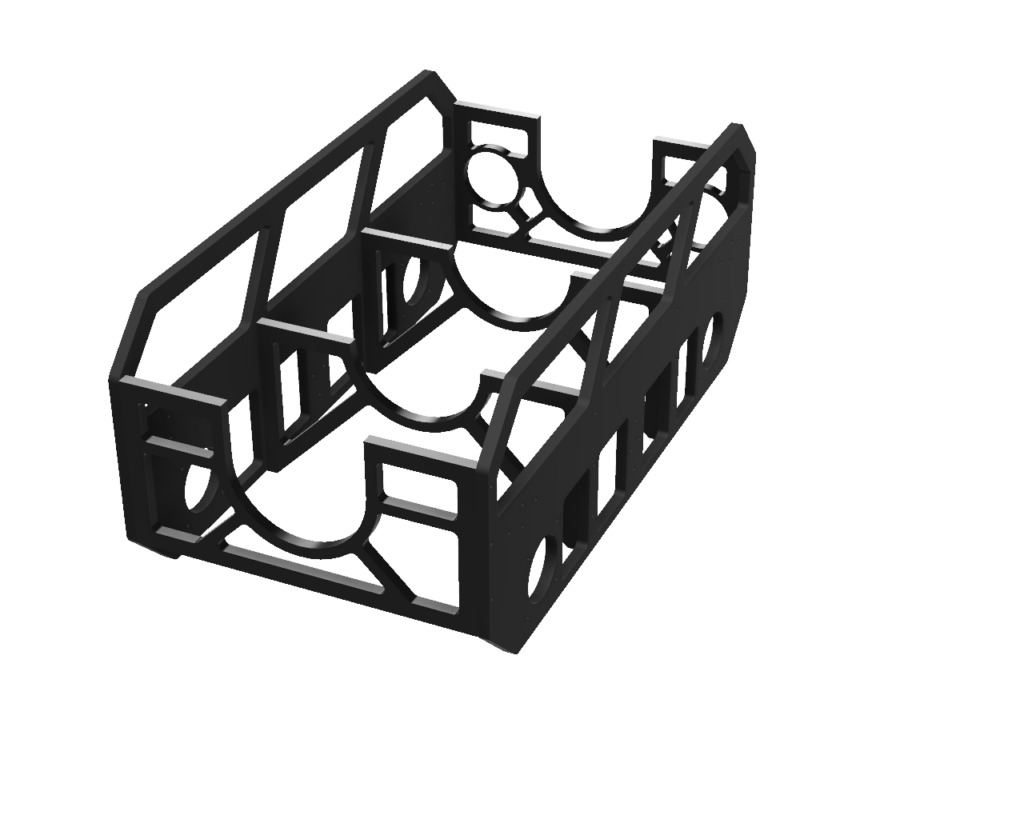
Fabrication
Pour fabriquer cette nouvelle version, je mettrai un peu moins de scotch, de colle et de pelletées de graisse pour que ça marche. Au revoir la cyanolit et la Dremel, bonjour impression 3D et usinage plastique.
Certaines pièces seront donc imprimées, comme les supports des propulseurs et des supports d’équipements internes, ce qui me permet d’utiliser des formes plus complexes et donc, de limiter les assemblages.
D’autres parties, notamment la structure et les bouchons, seront usinées en matière plastique (PEHD pour les intimes), puis assemblées avec de la visserie inox. Cela permettra de faciliter le montage et le démontage, tout en donnant une meilleure durée de vie à ce prototype.
Enfin, le nouveau tube en plexiglas a été réceptionné. Une fois que la structure et les bouchons seront usinés, l’assemblage pourra commencer !

En attendant, je vous souhaite à tous un excellent été et pour les plus chanceux, d’excellentes vacances !
A très bientôt !
bientôt la vidéo sur les essais en piscine… à suivre donc et garder en mémoire l’élastique pour glisser l’anecdote pour les futurs interviews .. 🙂