C’est un peu exagéré, je n’ai pas vraiment pleuré. Mais quand même, il y a pas mal de colle dans mon prototype et comme j’ai commencé en plein mois d’Août, j’ai aussi pas mal transpiré.
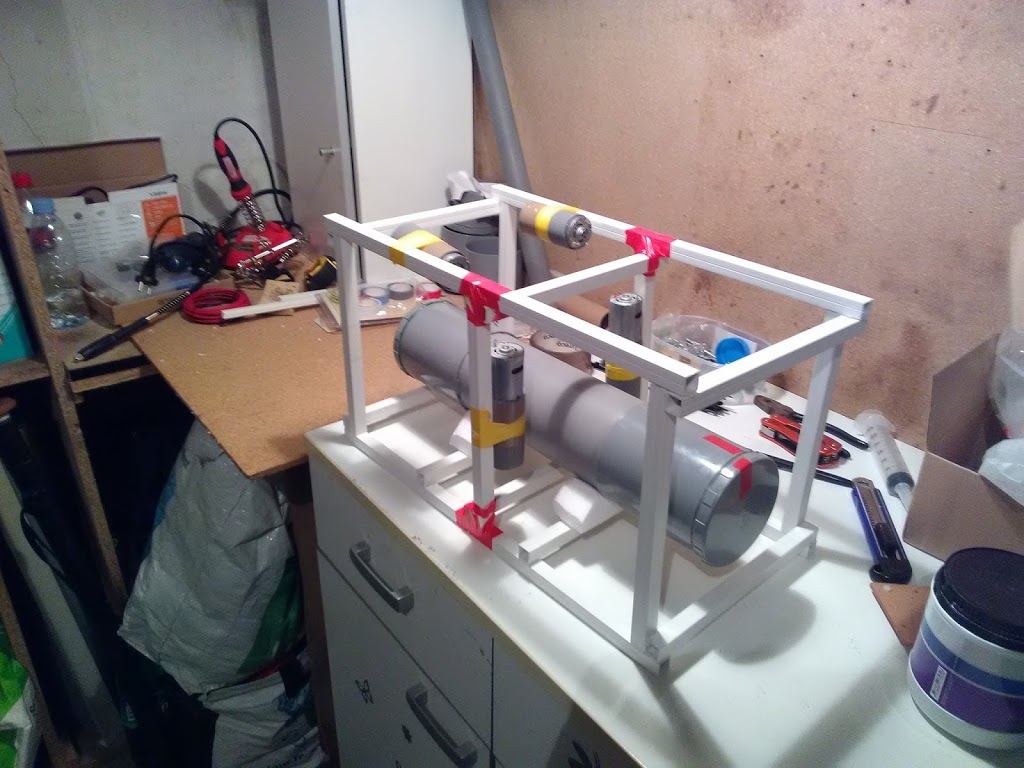
Voilà donc où j’en suis ! Après un énième passage à Leroy-Merlin pour acheter de la matière première ou des outils, j’ai complètement revisité l’agencement intérieur du tube étanche. J’ai taillé 2 disques dans du plasticard (en réalité, du polystyrène), qui me servent à maintenir 3 tiges filetées. Cela me laisse beaucoup plus de liberté pour l’implantation des éléments et l’accès aux composants est du coup très facile. Les tiges filetées me permettent de fixer les supports, avec de simples serre-câbles.
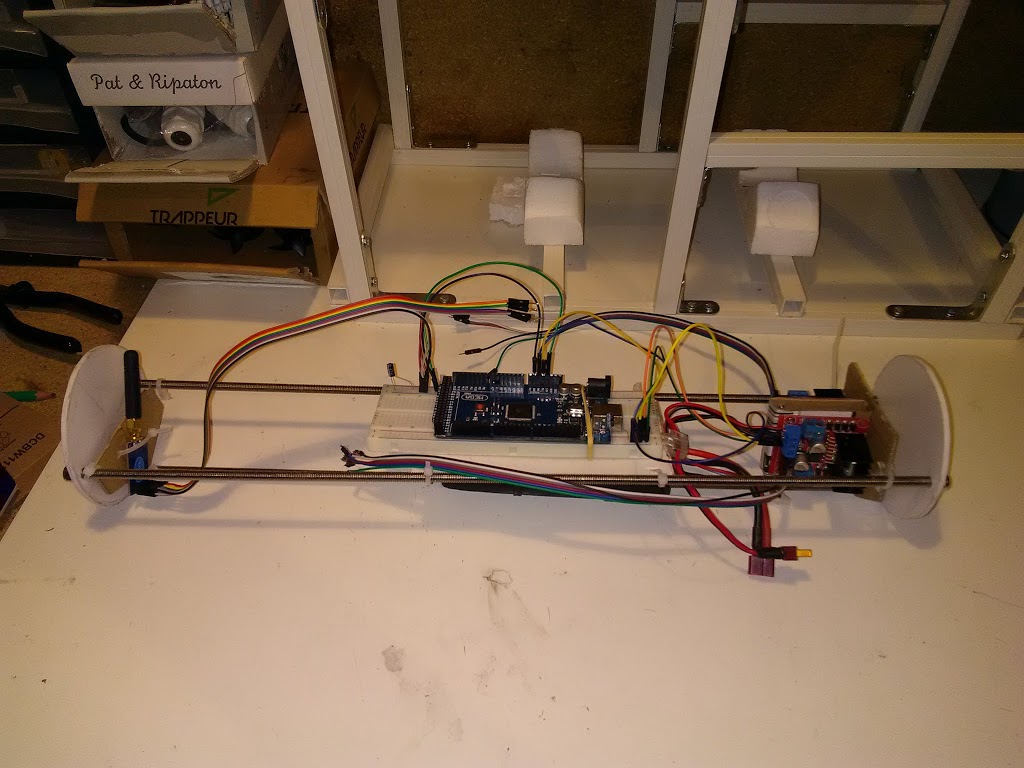
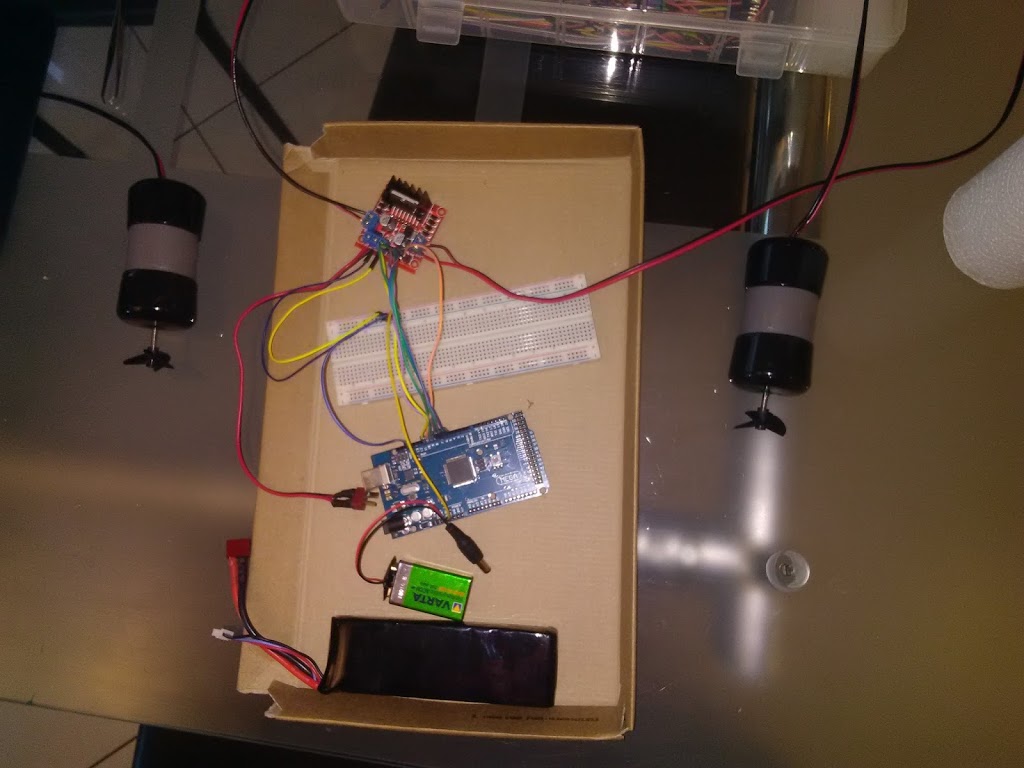
A ce stade, j’ai relié tous les éléments entre eux :
– carte Arduino Méga
– module radio CC1101
– 2x controleurs L298N
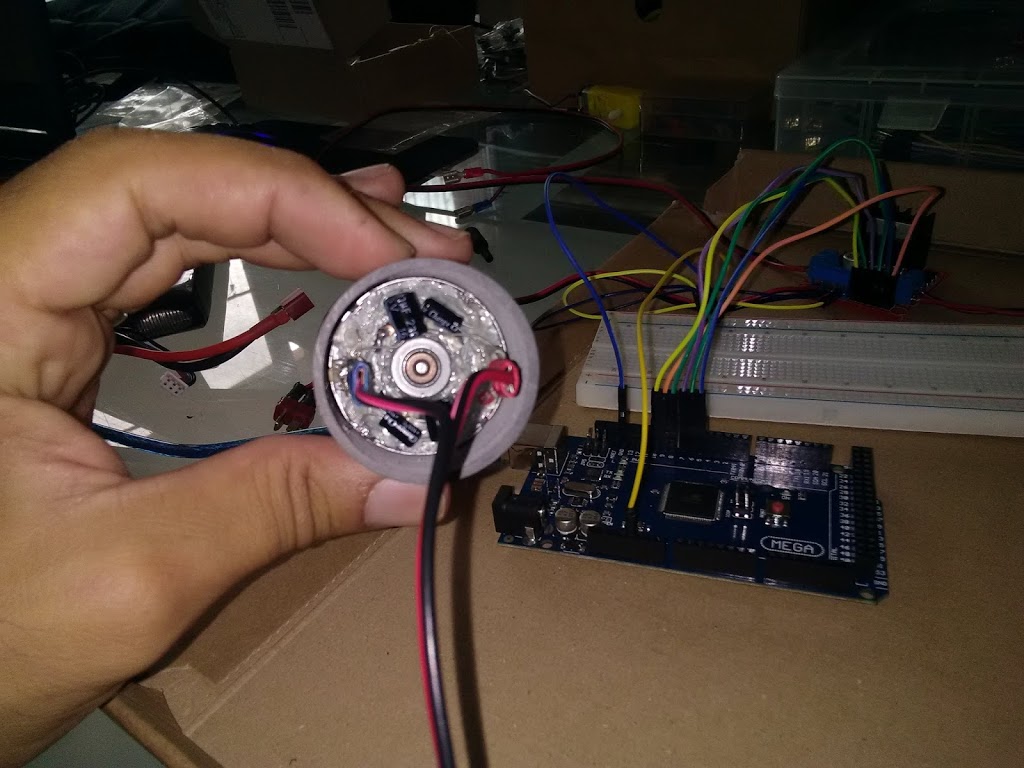
– 4x moteurs 6-12V
– batterie 7.4V 5000mAh

Pour limiter les parasites (qui m’ont rendu fou la dernière fois que j’ai essayé de faire une voiture télécommandée) et donc, des comportements aléatoires, toutes les interconnections sont découplées avec 2 condensateurs (4.7uF et 220uF).
J’utilise pour l’occasion une télécommande fabriquée avec :
– une carte Arduino Uno
– module radio CC1101
– 2x joysticks analogiques
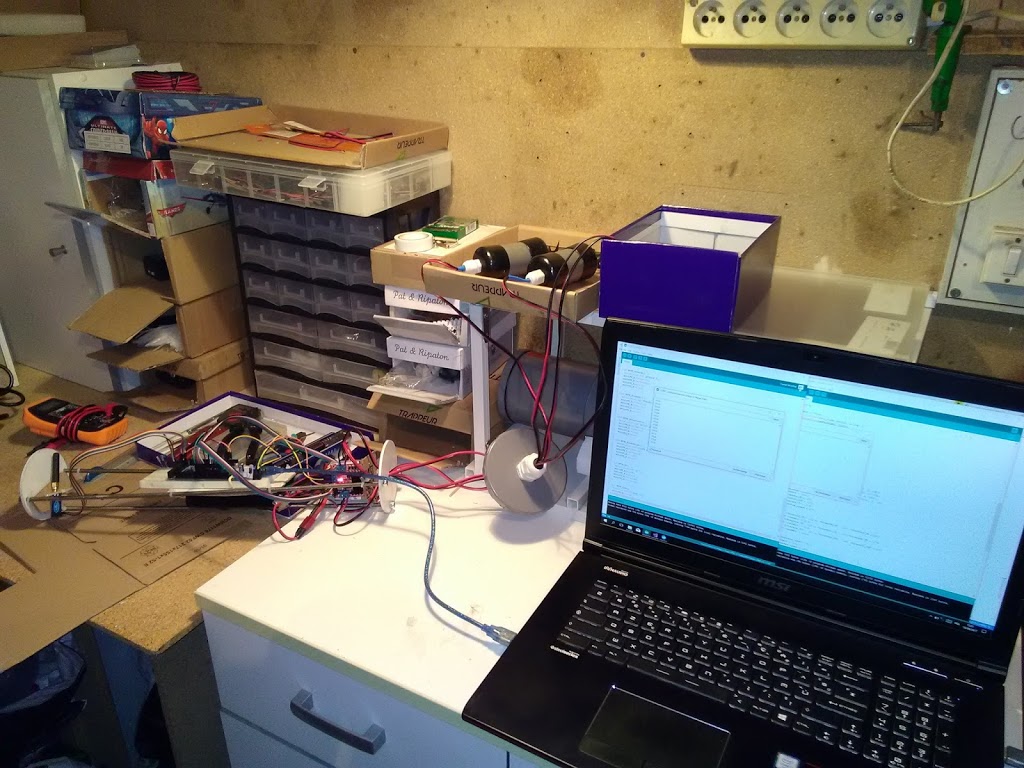
Une fois que tout est branché, je peux enfin tester que tout fonctionne correctement, en utilisant le port série de la carte Arduino pour l’alimenter et vérifier que les signaux radio sont bien reçus. Suspens… Mais bonne surprise : tout fonctionne sans aucun soucis ! Pour la peine, j’ai fait la danse de la victoire dans ma cave. De toute façon, personne ne m’a vu.

Après ce premier test complet, je réalise le câblage et le montage final des éléments sur le prototype. J’en profite même pour le re-tester, une fois complètement fermé, la carte Arduino étant alimentée par une pile 9V. Tout fonctionne normalement, aucune perte de signal et pas de parasites à signaler…
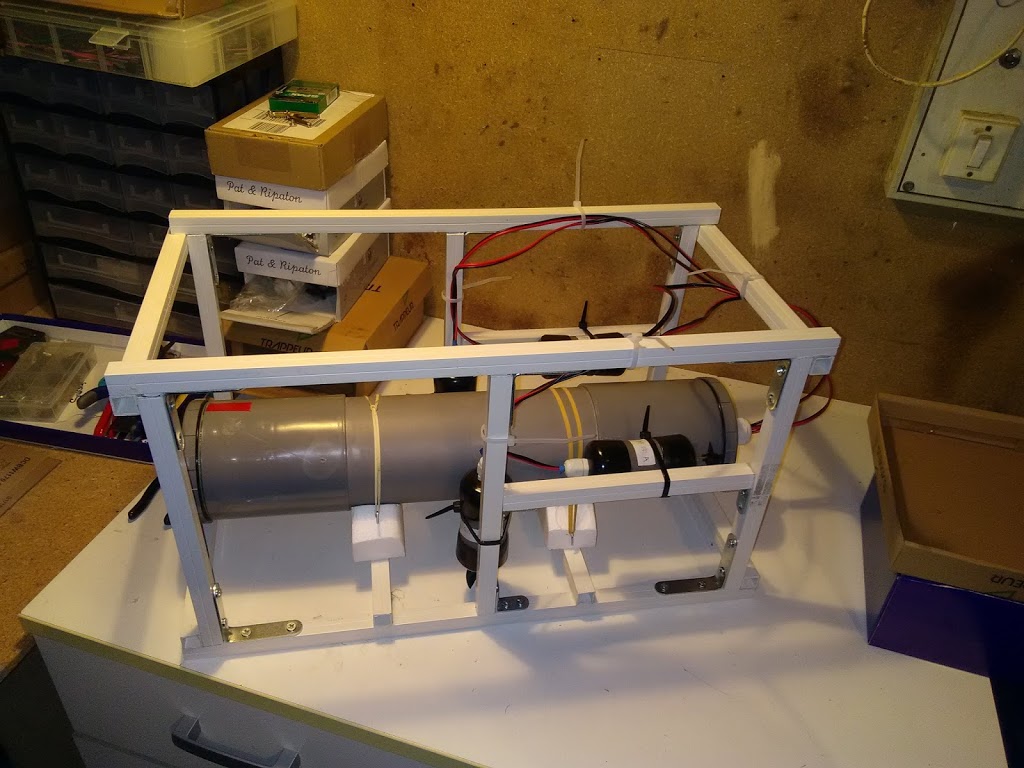
Je suis content de voir le proto v1 enfin terminé ! Ce n’est que la première version… J’ai déjà une foultitude d’idées pour la v2, à commencer par la structure extérieure (à remplacer par 2 panneaux de plexi) et les attaches du tube étanche sur la structure (à remplacer par des colliers adaptés).
Ca sera pour la prochaine fois !