
NAUVA vous souhaite une excellente année 2019 à tous !
Il ne restait que quelques jours pour les voeux, mais tant qu’on est en Janvier, j’ai bon !
A très bientôt pour la suite de l’aventure 🙂

Engineering & Robotics
NAUVA vous souhaite une excellente année 2019 à tous !
Il ne restait que quelques jours pour les voeux, mais tant qu’on est en Janvier, j’ai bon !
A très bientôt pour la suite de l’aventure 🙂
Aujourd’hui, NAUVA a tout juste un an !
Joyeux anniversaire 😊

Beaucoup de choses se sont passées pendant cette année : la première mission d’ingénierie, la réalisation du premier prototype et les essais en piscine, le développement du second prototype et sa fabrication…
Une année riche en émotions, avec ses hauts et ses bas, ses périodes d’euphorie et ses périodes de doute. Dans l’ensemble, une bonne première année !
Alors, que l’aventure continue et que les années à venir soient pleines de succès !
Bon d’accord, je me suis un peu laissé emporter par le boulot et je n’ai pas vu le temps passer. Oui, je sais, j’aurais pu appeler pour prévenir, mais je n’avais plus de batterie. C’est vrai, en plus !
Depuis plusieurs semaine, l’objectif est de finaliser la fabrication du second prototype. Comme je vous le disais dans mon précédent article (hum, cet été !), cette version bénéficie d’un bien meilleur traitement que le premier jet : le tube est en plexiglas coupé à l’usine, les bouchons sont en PEHD et la structure externe est réalisée en plaques de POM-C noir, le tout découpé sur plans dans une usine près de la zone industrielle de Carros.

Les pièces spéciales, comme les supports moteurs, les caches d’hélices et autres supports sur mesure, sont réalisés en impression 3D. Certains designs évoluent encore, pour optimiser le nombre total de pièces et faciliter l’assemblage, tout en préservant la fonctionnalité.
Les premières pièces seront livrées avant fin Novembre, pour être assemblées courant Décembre.
A l’intérieur de la bête, l’architecture a été revue pour permettre à la carte Raspberry de jouer le rôle de cerveau : elle prend toutes les décisions et gère la mémoire du robot. La carte Arduino exécute et sert d’interface avec les moteurs et les des instruments. Enorme avantage : le wifi intégré sur la Raspberry permet de prendre le contrôle du robot à distance depuis un PC portable, d’accéder à tous ses paramètres et même de le programmer en direct ! C’est un gros changement, qu’il faudra soigneusement protéger pour éviter qu’un petit rigolo parvienne à hacker le robot pour en faire un Terminator.

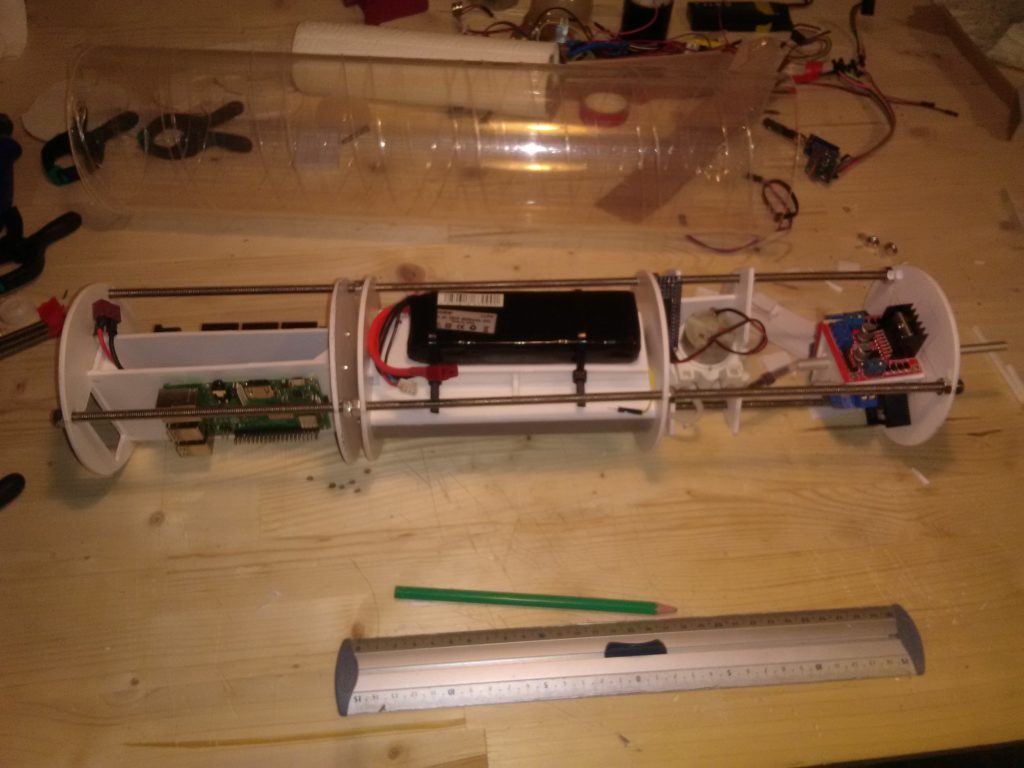
Côté instruments, le robot dispose d’une puce GPS pour obtenir sa position en surface, un gyro-compas pour dériver sa position par rapport à son accélération, ainsi qu’un sonar et un capteur de pression / température, pour déterminer sa profondeur. L’interface avec le gyro-compas est particulièrement compliquée et demande beaucoup de patience… Autant dire que j’ai failli le réduire en nano particules plus d’une fois.
Les moteurs et la pompe de ballast fonctionnent maintenant en 12V, pour plus de performance. Mais, grâce au service Colissimo de la Poste, la nouvelle batterie 12V n’est jamais arrivée. C’est marrant, parce qu’ils prétendent ne pas me trouver à mon adresse, mais ils me trouvent sans difficulté pour m’apporter la facture. Sans parler du service client qui est simplement inexistant ou des agents qui se contentent de me répéter ce que je peux lire sur le site internet.
Vous voyez bien que je n’avais plus de batterie !
Je dois donc en recommander une nouvelle et espérer pouvoir me faire livrer par un corbeau.
Pour couronner le tout, une canalisation d’eau s’est mise à fuir dans la cave, juste au-dessus de mon atelier. Au final, j’ai réussi à tout sauver et à colmater la fuite, mais quand même, ça m’a fait perdre un temps précieux. Et voilà que l’hiver arrive bientôt… Ca va devenir marrant de bosser dans la cave, en doudoune avec des moufles.
Mais le plus marrant, ça va être de tester tout ça. Je crois que je vais m’arranger pour avoir suffisamment de retard pour réaliser les tests en été 🙂


Après avoir plusieurs fois reporté l’événement pour diverses causes (pas assez d’eau, trop d’eau, trop froid, manque de temps…), j’ai finalement réussi à réunir les conditions nécessaires pour réaliser les tests en piscine du robot !
Je tiens donc tout d’abord à remercier Albin et Julia pour le prêt de leur piscine, et surtout à Marc, pour avoir réussi à me motiver et avoir accepté de se mouiller pendant que je restais bien au sec… Pour info, l’eau était à 12°C !
C’est donc avec grand plaisir et un peu d’appréhension que j’ai mis le robot dans l’eau pour la première fois, Jeudi 19 Avril. J’avais passé en revue les différentes catastrophes qui pouvaient en découler (il ne marche pas, il prend l’eau, il reste bloqué au fond, il s’enfuit, il attaque les gens et déclenche le soulèvement des machines…), mais j’ai du me rendre à l’évidence : on était prêt à le faire et il fallait simplement accepter le risque.
Après avoir résolu les quelques fuites récalcitrantes (« La graisse, c’est la vie » disait Caradoc), on a put ajuster le lestage et l’équilibrage. Les quelques 500g de lest que j’avais déjà fixé sur le cadre ne suffisaient pas à le rendre neutre en plongée : il manquait encore 1.5kg de plomb ! On a donc attaché une ceinture de plongée, positionnée au 3/4 avant du robot.
Avec ce réglage, le robot plonge et remonte sans aucun effort, avec une assiette bien à plat.
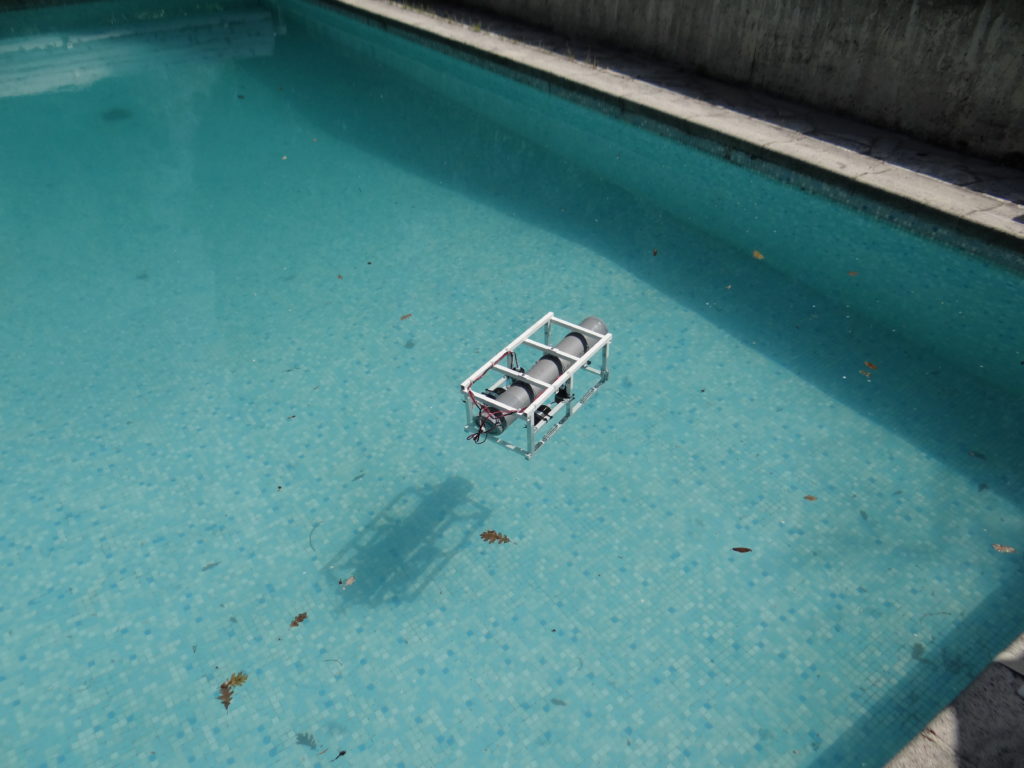
On a pu procéder au tests de navigation en surface. Le robot répond bien aux ordres transmis par la télécommande, même si le lest additionnel le ralentit considérablement… En surface, on arrive à le contrôler sans trop de difficulté sur toute la longueur de la piscine, sans perte du signal radio. Ça, c’est fait !
Avec la ceinture de lestage en place, le robot s’éloigne doucement du bord de la piscine et rejoint le milieu, accompagné par Marc qui le surveille. Une petite impulsion sur les propulseurs verticaux et, hop !, il disparaît sous la surface quelques secondes, avant de remonter lentement.
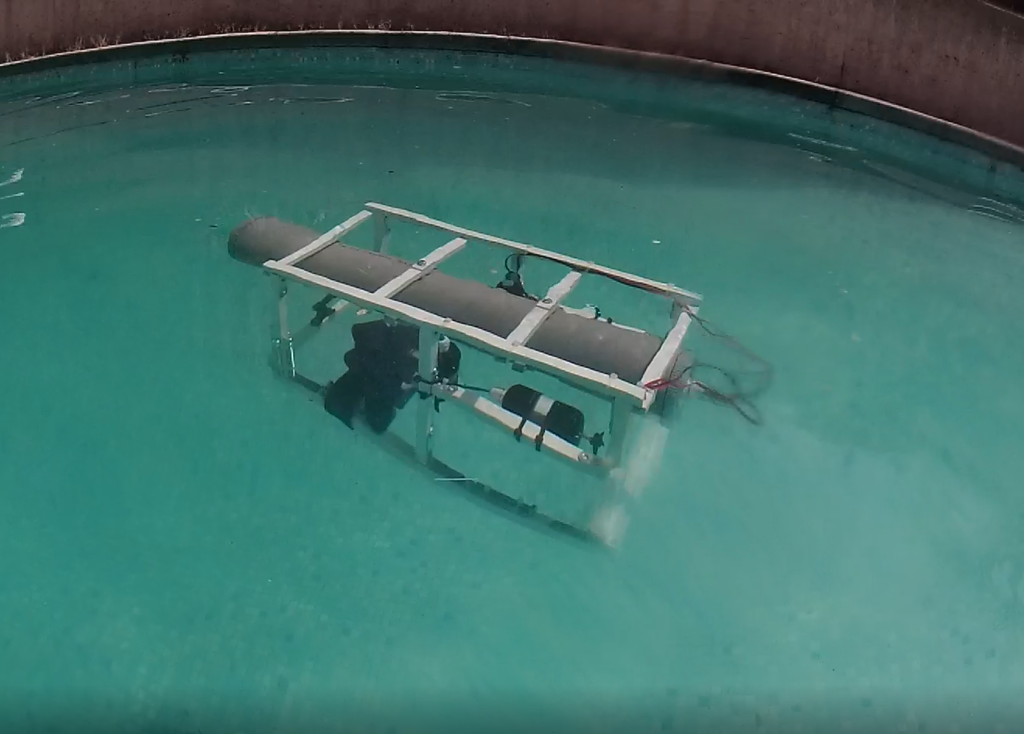
Le ballast interne est vide, donc le robot est légèrement positif : il a tendance à remonter tout seul. Je remplis le ballast et là, le voilà qui se stabilise sans difficulté à 30 centimètres sous la surface. Je me sers alors des propulseurs verticaux pour régler sa profondeur, mais j’atteins rapidement une limite : le signal radio ne porte pas loin sous l’eau !
En effet, à 2 mètres du bord, le robot reste contrôlable en plongée, jusqu’à 1.5m de profondeur. Par contre, dès qu’il s’éloigne, le signal perd en intensité, limitant la profondeur maximum où il reste sous contrôle : à 6m du bord, il ne peut plonger qu’à 50cm avant de perdre le contact.
L’eau est un mauvais isolant pour le courant électrique, ce qui fait que le signal radio est partiellement diffusé par le milieu, en fonction de la fréquence du signal et la concentration en sels et minéraux. Ainsi, dans l’eau douce d’une piscine, mon signal 433MHz arrive à atteindre le fond de la piscine à quelques mètres de l’émetteur, là où un signal à 2.4GHz (typiquement le WiFi ou le Bluetooth) ne dépasseraient pas quelques centimètres. Un signal en 27MHz (typique des amateurs de CB ou de modélisme) est capable de traverser environ 10m d’eau douce ! Mais en eau de mer (donc, conductrice…), c’est une autre affaire !
Vous avez été sages, alors voilà une vidéos des tests réalisés !
Le robot a donc correctement réagi aux instructions que je lui ai transmis par radio, même à 1.5m de profondeur. Le ballast a parfaitement joué son rôle d’équilibrage en permettant de régler la densité et de monter / descendre naturellement. Ces test m’ont permis de déterminer le bon lestage à appliquer pour obtenir une flottabilité neutre et un bon équilibrage.
En revanche, il y a un temps de latence dans le programme pour limiter la consommation électrique, ce qui fait que les instructions de déplacements manquent de précision. Avec le lestage, les propulseurs peinent à faire avancer ou tourner le robot : des hélices plus grandes (55mm au lieu de 35mm) pourraient améliorer les performances.
De plus, le principe de contrôle des propulseurs peut être amélioré pour permettre de tourner plus facilement lorsque le robot est en mouvement : actuellement, le robot marque une pause avant d’exécuter l’instruction de tourner.
On a pu se rendre compte que la solution de fermeture avec un bouchon à visser fonctionne, mais… qu’elle n’est pas très pratique ! A chaque test, on devait ouvrir le robot pour vérifier l’électronique et chaque ouverture / fermeture prend du temps. Sans compter qu’il faut vérifier l’étanchéité après chaque ouverture du cylindre, le plus souvent en remplissant les filetages avec de la graisse. Caradoc serait fier de nous !
Les prochaines étapes pour le robot seront donc :
– une nouvelle solution de fermeture du tube
– des hélices plus grandes pour une meilleure propulsion
– une logique revue pour un meilleur contrôle
– de nouveaux composants pour le rendre autonome (GPS, gyrocompas, pression, sonar…)
– un nouvel agencement des moteurs pour permettre les mouvements latéraux (peut être avec des pods orientables)
– un tube plus grand… pour faire entrer les nouveaux composants !
Je vous remercie d’avoir lu jusque là !
La campagne de tests n’est pas finie : on y retournera à chaque fois qu’un nouveau composant sera ajouté et pour tester le programme autonome. Et pourquoi pas un test en mer ?
A très bientôt pour de nouvelles aventures sous-marines…
Bienvenue sur le nouveau site de NAUVA-E&R !
J’ai déplacé toutes les informations et les nouvelles qui étaient sur blogspot.
En espérant qu’il vous plaît !
Bonne navigation.

NAUVA se dessine un nouveau logo !
Grâce à mes talents de dessinateur et à mon sens artistique inné, voilà le nouveau logo de NAUVA.

Les 2 vagues symbolisent à la fois la montagne (en gris) et la mer (euh… en bleu).
Je cherchais un effet sympa pour le nom, mais j’ai finalement opté pour la simplicité : NAUVA en blanc, avec un effet d’ombre portée.
N’hésitez pas à me faire part de vos commentaires et même, de vos propositions si vous en avez !
A bientôt !
Ce blog sera consacré au Projet NAUVA : la création d’un robot sous-marin pour la préservation de l’environnement et du patrimoine.
Je donnerai ici des nouvelles sur les avancements du projet, ainsi que des articles généraux concernant le sujet (les AUV, l’environnement, l’archéologie sous-marine…).
Bonne lecture !
Gaël