Objectifs et Concepts
Le Projet NAUVA a pour but de créer un robot sous-marin semi-autonome, sans fil qui le relie à la surface. Ce type d’engin s’appelle un Autonomous Underwater Vehicle (AUV), par opposition à un Remote Operated Vehicle (ROV) qui traîne un câble ombilical pour la puissance et les signaux de commandes. D’où le nom du projet !
Pour Quoi et Pour Qui ?
Le robot de base répondra à un cahier des charges relativement simple en termes de fonctionnalités : principalement, de pouvoir se déplacer de manière autonome et atteindre une position (coordonnée et profondeur) déterminée par l’utilisateur, ainsi que capturer des photos et des vidéos pour une exploitation future (pas de transmission en temps réel).
Par l’addition de modules d’extension et en mettant à jour le logiciel / l’IA, le robot pourra réaliser d’autres missions, comme d’aller relever des données scientifiques sur une zone déterminée par l’utilisateur. Il existera donc une ‘base’ commune et des ‘modules’ spécifiques, qui permettront d’ajouter de nouvelles fonctionnalités, en fonction des besoins.
Ces modules pourront être de plusieurs natures :
- instrument scientifique (sonar, magnétomètre, filtre mesurant la qualité de l’eau…);
- bras préhenseur;
- outil spécifique : foret d’échantillonnage;
- caméra supplémentaire;
- transpondeur pour permettre la communication avec la surface;
- extension de batterie;
- panier de transport;
- équipement de sécurité : bouée balise, bouteille et détendeur de secours;
Pour une mission de courte durée, il sera possible de faire appel aux services de l’entreprise, en fonction de l’opération à réaliser :
-
Exploration : 
Cette activité s’adresse d’une part aux particuliers et au clubs de plongée, qui souhaitent disposer d’un moyen simple de réaliser des prises de vues ou une reconnaissance sur le site d’une future plongée. D’autre part, elle s’adresse aux entreprises dans le domaine de l’océanologie, qui souhaitent disposer d’un moyen de réaliser des relevés de données scientifiques à l’aide d’instruments spécialisés, sur une zone géographique ou à un endroit précis, de manière autonome.
-
Inspection et Intervention : 
Cette activité s’adresse aux particuliers ou aux entreprises qui souhaitent réaliser une inspection et/ou une intervention sur une structure immergée (ouvrage d’art, canalisation, coque de navire, installation portuaire).
-
Dépollution :
 Cette activité s’adresse aux collectivités qui souhaitent dépolluer une zone géographique définie en retirant de l’environnement les macro-déchets plastiques, comme les bouteilles, les emballages et les sacs qui s’accumulent à l’embouchure des rivières.
Cette activité s’adresse aux collectivités qui souhaitent dépolluer une zone géographique définie en retirant de l’environnement les macro-déchets plastiques, comme les bouteilles, les emballages et les sacs qui s’accumulent à l’embouchure des rivières.
Comment ?
Afin de démontrer la faisabilité du projet et les fonctionnalités du robot, il est nécessaire de réaliser plusieurs prototypes et de nombreux tests.
Proto v1
Le premier prototype de robot sous-marin est constitué d’un cylindre étanche en PVC contenant toute l’électronique et quatre moteurs étanches, le tout supporté sur un cadre parallélépipédique en PVC.
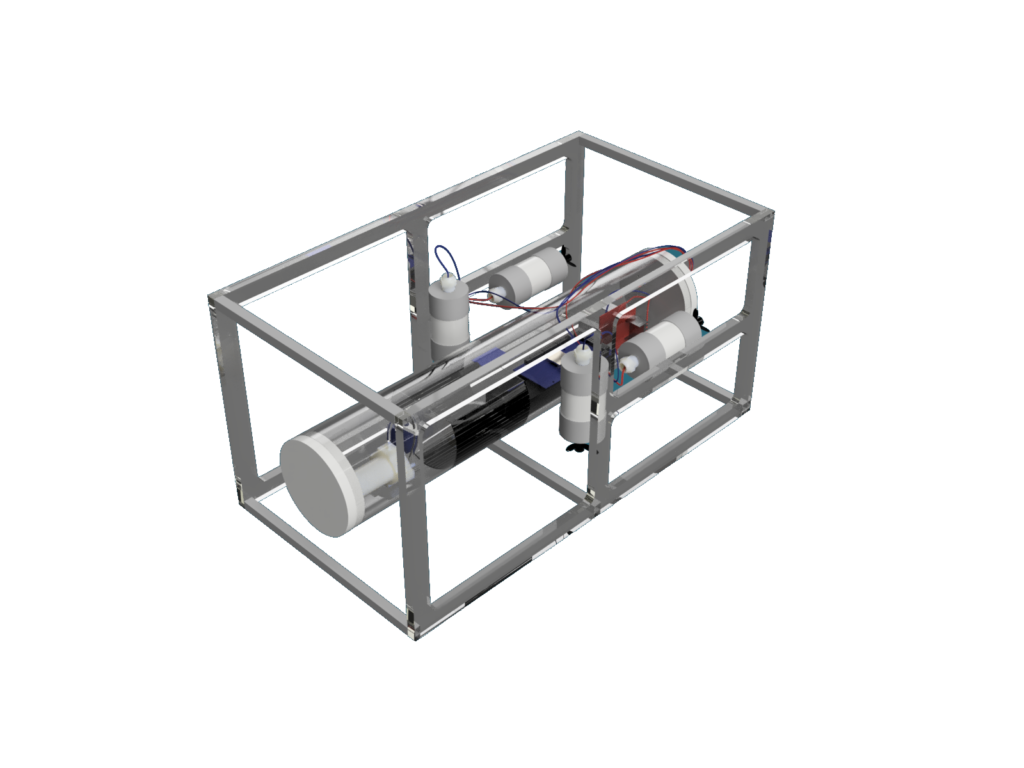
Cette version du robot est en réalité un drone, puisqu’il est contrôlé par une télécommande utilisant une radio 433MHz. Cette fréquence est suffisante pour tester la navigation en surface et à faible profondeur, par opposition au 2.4GHz qui est incapable de traverser plus de quelques centimètres d’eau douce.
Le cylindre étanche est aussi équipé d’un ballast souple, permettant au sous-marin de plonger en statique et de s’équilibrer.
Le prototype a été testé en piscine en Avril 2018 !
Ces test avaient pour objectifs de :
- valider les solutions pour l’étanchéité;
- valider l’agencement des composants (moteurs, électronique);
- tester la navigation en surface et en plongée.
Maintenant que cette base est validée, il est temps de penser à la suite… et d’apporter de nouvelles fonctionnalités au robot.
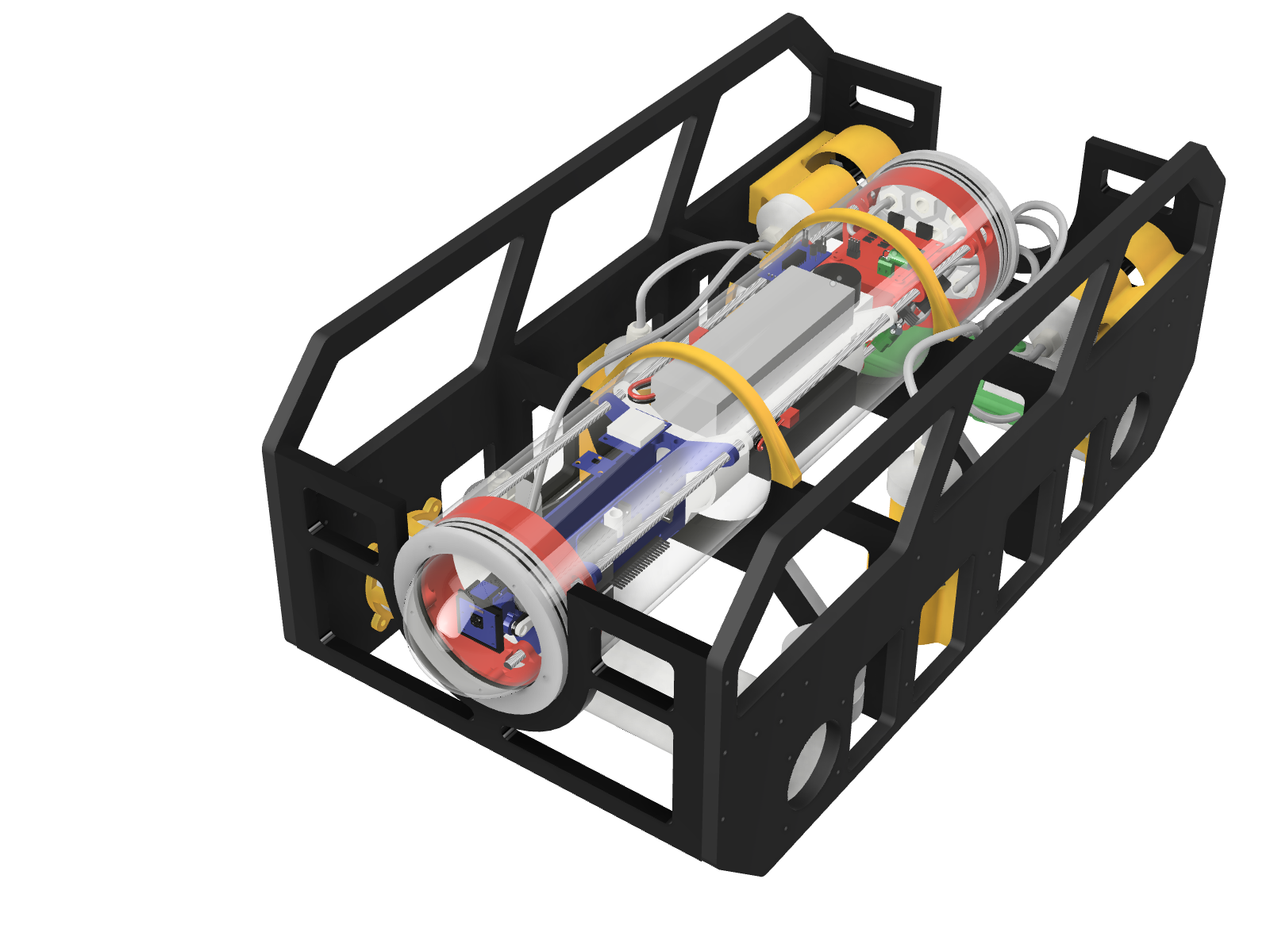
Proto v2
A peine les premiers tests finis, le travail sur la seconde version du prototype a déjà commencé.
L’objectif est d’apporter des améliorations et des fonctionnalités supplémentaires par rapport à la version précédente, notamment des instruments, qui sont les ‘yeux et les oreilles’ du robot afin de le rendre autonome.
Pour loger ces éléments supplémentaires, un nouveau cylindre étanche, plus large et moins long, est à l’étude, ainsi qu’un système de fermeture plus compacte.
- ajout d’une antenne GPS, pour connaître la position absolue en surface;
- ajout d’une centrale inertielle, pour déduire la position relative grâce à l’accélération en plongée;
- ajout d’un capteur de pression externe, pour connaître la profondeur de plongée;
- ajout d’un sondeur externe, pour connaître la distance par rapport au fond.
Proto v3
Lorsque les fonctionnalités de la v2 auront été validées, il sera temps d’en rajouter une couche ! Cette fois, il sera question d’intelligence et de robot vraiment autonome.
Pour cela, il sera nécessaire de lui donner les moyens d’analyser son environnement et aussi de communiquer avec l’utilisateur :
- ajout d’un sonar, pour être capable de repérer les obstacles;
- ajout d’une caméra, avec une reconnaissance de formes, pour identifier l’environnement immédiat du sous-marin;
- ajout d’une communication par ultra-sons, pour pouvoir communiquer avec la surface ou un plongeur;
- ajout d’un RaspBerry Pi3, pour le traitement des données en temps réel, le calcul de trajectoire et l’intelligence artificielle;
Proto v4
L’objectif de cette version sera de démontrer qu’un robot peut identifier un certain nombres d’objets et les attraper :
- ajout d’un bras robotique, muni d’une pince, pour attraper des objets;
- ajout d’un ‘panier’ pour transporter les déchets capturés;

Proto v5
Cette étape introduira un nouvel élément dans la solution : une bouée, positionnée par GPS, jouant le rôle d’un container de déchargement pour les déchets récoltés, mais aussi de point de recharge pour les batteries du ou des robots de nettoyage.
En gros, appliquer le principe des robots Roomba au nettoyage des fonds marins !



